您好,欢迎访问三七文档
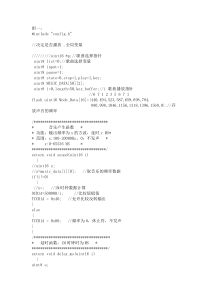
三自由度机械臂计算机控制系统作者:姜陈炀徐超指导教师:陈国定一、课题介绍本课题研究了一种三自由度机械臂的控制方法与实现,采用伺服舵机驱动,单片机+PC机两级控制,完成控制系统的软硬件设计。单片机通过RS-232串口接收来自上位机的运动指令,并将其转换成伺服舵机的运动控制脉冲,输出并驱动伺服舵机,实现了机械臂各关节的运动控制。总体方案第一关节第三关节第二关节单片机控制板机械手(电磁铁)二、解决的关键技术1、上位机部分:PC控制界面设计、RS-232通信程序;2、单片机控制部分:通信接口、I/O接口;3、电机驱动与定位控制三、完成的主要工作1.单片机控制板设计芯片选择:C8051F系列单片机优点:资源丰富,内部有AD、DA等可以使用软件进行配置,大大简化了硬件电路,也大大方便了功能扩展;运行速度快,70%的指令只需1~2个系统时钟周期,而不用进行12分频,最高可达25M速度,比传统51单片机快至少10倍。并且其片内调试电路提供全速、非侵入式的在系统调试,不需要仿真器,而只需要一个适配器就可以进行在线调试。单片机控制板原理图:显示模块原理图2.执行器:采用伺服舵机★实现各环节运动控制;★能同时控制多个关节的运动;★有较高的定位精度。伺服舵机控制图伺服舵机定位控制原理3.上位机人机界面设计★采用VB编写★界面图串口配置:4.RS232串行通信★接口电路设计★接口程序设计单片机通信方式:通信时序——采用方式1方式1提供标准的异步、全双工通信,每个数据字节共使用10位:一个起始位、8个数据位(LSB在先)和一个停止位。数据从TX引脚发送,在RX引脚接收(。在接收时,8个数据位存入SBUF,停止位进入RB8(SCON.2)■通信协议格式#CHXD3D2D1!起始位通道号脉宽系数百位脉宽系数十位脉宽系数个位终止符主程序流程图开始T1为计数器初始值0,T0为计时器,自动重装模式T0,T1,T2,T3开启TL1=R7?电机号寄存器R6CLRP1.0CLRP1.1CLRP1.2CLRP1.3CLRP1.4CLRP1.5CLRP1.6=1=2=3=4=5=6=7CLRP1.7=8MAIN跳转至MAINTH1:TL1=0000H串行通信子程序流程图:进入中断读SBUF收到“#”?收到第一个字符,字符序=1收到“!”?收到第六个字符,字符序R4=5字符序YNNY接收到字符为通道号接收到字符为脉宽系数百位,装入R1接收到字符为脉宽系数十位,装入R2接收到字符为脉宽系数个位,装入R3字符序=0=1=2=3=4其他字符序+1将R1,R2,R3中的BCD码转换成十六进制装入R7退出中断清中断标志5.机械臂制作(模型)机械臂控制演示谢谢指导!
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 hhloveloveqq
hhloveloveqq
本文标题:三自由度机械臂
链接地址:https://www.777doc.com/doc-118832 .html