您好,欢迎访问三七文档
当前位置:首页 > 行业资料 > 国内外标准规范 > TCITSA 09-2021 车路协同系统 应用层数据标准
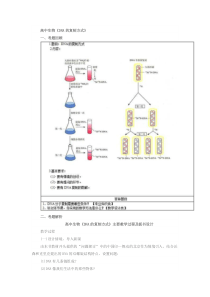
T/CITSA09-2021ICS13.310A91团体标准T/CITSA09-2021车路协同系统应用层数据标准Intelligentvehicleinfrastructurecooperativesystems;datastandardinapplicationlayer2021-07-26发布2021-07-26实施中国智能交通协会发布T/CITSA09-2021I目次前言...............................................................................................................................................................II1范围................................................................................................................................................................12规范性引用文件...........................................................................................................................................13术语和定义....................................................................................................................................................14符号和缩略语...............................................................................................................................................35体系框架........................................................................................................................................................36基本应用........................................................................................................................................................47应用场景........................................................................................................................................................68应用层数据标准...........................................................................................................................................79应用层数据管理.........................................................................................................................................24T/CITSA09-2021II前言本标准依据GB/T1.1—2020给出的规则进行起草。本标准由中国智能交通协会提出并归口。本标准起草单位:中国公路工程咨询集团有限公司、同济大学、中咨泰克交通工程集团有限公司、中咨华科交通建设技术有限公司、长安大学、兆边(上海)科技有限公司、北京云星宇交通科技股份有限公司、中信科移动通信技术股份有限公司本标准主要起草人:李红芳、马万经、孙昊、安泽萍、王玲、朱晓东、贺静、李太芳、张艳、何新平、彭敏、孙拓、戚新洲、郝若辰、崔鹏飞、张新、廖镭鸣、龚思远、周正兰、吕雷、李立T/CITSA09-2021-1-车路协同系统应用层数据标准1范围本标准规定了车路协同系统应用层数据的一般规定、体系框架、基本应用、应用场景、应用层数据标准、数据管理的技术要求。本标准适用于高速公路与城市道路中车路协同系统应用所需要的数据格式和消息格式设计。2规范性引用文件下列文件对于本标准的应用是必不可少的。凡是注日期的引用文件,仅所注日期的版本适用于本标准。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本标准。GB/T31024.3-2019合作式智能运输系统专用短程通信第3部分:网络层和应用层规范SAEJ2735Dedicatedshortrangecommunications(DSRC)messagesetdictionarySAEJ2945/1V2On-BoardSystemRequiremntsforV2SafetyComunicationsETSITS102637InteligentTransportaionSystems(ITS):VehicularComunications:BasicSetofAplicationsTITS0115-2019城市交通运行状况采集系统数据融合平台技术规范YD/T3709-2020基于LTE的车联网无线通信技术消息层技术要求T/CSAE53-2020合作式智能运输系统车用通信系统应用层及应用数据交互标准(第一阶段)GB2580—2016道路交通信号控制GB5768—209道路交通标志与标线GB/T24726-2009交通信息采集视频车辆检测器GB/T20609-2006交通信息采集微波交通流检测器3术语和定义3.1术语3.1.1车路协同系统intelligentvehicleinfrastructurecooperativesystems车路协同是采用先进的无线通信和新一代互联网等技术,全方位实施车车、车路动态实时信息交互,并在全时空动态交通信息采集与融合的基础上开展车辆主动安全控制和道路协同管理,充分实现人车路的有效协同,保证交通安全,提高通行效率,从而形成的安全、高效和环保的道路交通系统。3.1.2路侧单元roadsideunit(RSU)安装在道路两侧或上方的通信功能实体。收集并处理交通传感器检测到的各种信息(如交通流量、突发事件、密集人群、交叉口行人信息、道路异物侵入、路面湿滑状态),通过有线或无线方式与网络连接,并通过无线通信接收来自车载单元(OBU)或其他路侧单元的信息。以无线通信的方式发送给车辆,以有线或无线通信的方式发送给其它路侧设备等。3.1.3路侧设备roadsidedeviceT/CITSA09-2021-2-安装在道路上方、下方及两侧的用于交通检测、控制、通信、传输、信息发布的设备总称,包括了线圈、雷达等交通检测器以及信号机、可变信息板等交通管控设备。3.1.4车载单元on-boardunit(OBU)安装在车辆上的,具备信息采集、处理、输入和输出接口,具有无线通信模块,用于V2X的功能实体。功能包括:收集各类车载传感器采集处理后的信息(如定位、运动等)发送给其它车载单元;接收来自其它车载单元的信息;接收来自路侧单元的信息;对接收到的信息和收集到的本车传感器信息进行处理,做出安全预警判断和车辆行驶建议,以合适的交互方式向驾驶人提供信息,或向车辆控制单元发出路径引导信息。3.1.5交通检测器trafficdetector具备检测基础交通信息数据,如车流量、车速、车间距、车辆类型、道路占有率等参数的设备。如视频车辆检测器、微波交通流检测器、环形线圈车辆检测器等。3.1.6可变限速dynamicspeedlimit根据采集的交通流状态参数、路况、以及天气条件等数据,经过相关算法控制,确定该条件下的最佳限速值,随后此限速值通过可变限速标志等显示屏发布,从而可对交通流进行限速控制。3.1.7慢行交通slowtraffic相对于快速和高速交通而言,有时亦可称为非机动化交通,一般情况下,慢行交通是出行速度不大于15km/h的交通方式。慢行交通包括步行及非机动车交通。3.1.8公交专用道exclusivebuslane指专门为公交车设置的独立路权车道,主要功能是方便公交网络应对各种高峰时段和突发状况带来的道路拥堵问题。3.1.9优先车道柔性管理lanewithintermittentanddynamicpriority根据实时的交通需求,对优先车道是否开放进行动态管理的策略。3.1.10车辆轨迹vehicletrajectory时空环境下,通过对车辆运动过程的采样所获得的数据信息,包括采样点位置、采样时间、速度等,这些采样点数据信息根据采样先后顺序构成了轨迹数据。3.1.11生态驾驶eco-driving以保护环境为原则的方式来驾驶汽车,温和地控制速度,能够减少空气污染与二氧化碳排放,而且还能节约成本与提高行驶的安全性。3.1.12动态车道dynamiclane通过交叉口范围内的车辆与路侧单元的实时通信,路侧单元收集网联车辆的状态数据,以此为基础进行进口道车道功能的实时划分。3.1.13综合信息generalmessageT/CITSA09-2021-3-包括了各类交通检测器数据,交管部门信息和出行信息(如拥堵路段及时长,事故路段、危险路段等)的综合数据。3.1.14可变信息板variablemessagesign用图形、文字、色彩或它们的组合等方式向道路使用者提供动态交通信息的显示板。3.2定义3.2.1路段link从一个节点到其相邻节点的道路称为路段。高速公路中两个匝道之间为一个路段,城市道路中两个交叉口之间为一个路段。3.2.2子路段section路段内部根据道路条件(如几何线型、车道数等)的变化又可以分成若干子路段,各子路段内部道路条件相同。4符号与缩略语以下缩略语适用于本标准:OBU:车载单元On-boardUnitRSU:路侧单元RoadsideUnitBSM:基本安全消息BasicSafetyMessageMAP:地图数据MapDataRSI:路侧单元发布的交通信息RoadSideInformationSPaT:信号灯消息SignalPhaseandTimingMessageV2X:车载单元与其他设备通讯VehicletoEverything5体系框架5.1一般规定体系应符合如下基本要求:——应统筹车路协同系统中的应用实现;——应从“车-路-云协同”的智能交通角度构建体系框架;——应在现有标准基础上设计并行结构下的体系框架。5.2系统组成车路协同数据资源体系应由三部分组成,车载端、路侧端和云端。其中路侧端可以分为路侧单元和路侧设备两个部分。5.3功能分布云端应接收、处理和发送区域级服务及管控诱导信息。云端可将信息发送给车辆,也可根据路侧端上报的交通状态等信息生成区域初步指令并发送给路侧端。路侧端应结合检测器、车载端和云端信息对T/CITSA09-2021-4-控制方案进行制定和发布。车载端应整合车辆与环境各方面信息,提取并发送自身状态,同时汇总信息并给出驾驶引导,供驾驶员决策或将控制指令下达给车辆控制器。图1体系功能分布5.4数据流图云端应可向信号灯、可变信息板等路侧设备发送SPaT、限速信息、车道信息和综合信息,可向路
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 刀客8888
刀客8888
本文标题:TCITSA 09-2021 车路协同系统 应用层数据标准
链接地址:https://www.777doc.com/doc-12723863 .html