您好,欢迎访问三七文档
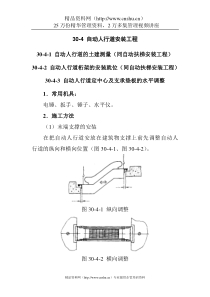
模糊控制学院:电气工程学院班级:09级自动化3班姓名:赵明学号:任课教师:刁晨单倒置摆控制系统的状态空间设计一.设计题目1.介绍单倒置摆系统的原理图,如图1所示。设摆的长度为L、质量为m,用铰链安装在质量为M的小车上。小车有一台直流电动机拖动,在水平方向对小车施加控制力u,相对参考系产生位移z。若不给小车施加控制力,则倒置摆会向左或向右倾倒,因此,它是一个不稳定系统。控制的目的是,当倒置摆无论出现向左或向右倾倒时,通过控制直流电动机,使小车在水平方向运动,将倒置摆保持在垂直位置上。2.用途倒立摆系统以其自身的不稳定性为系统的平衡提出了难题,也因此成为自动控制实验中验证控制算法优劣的极好的实验装置。单倒立摆的系统结构、数学模型以及系统的稳定性和可控性,对倒立摆进行了成功的控制,并在MATLAB中获得了良好的仿真效果。倒立摆控制理论将在半导体及精密仪器加工、机器人技术、伺服控制领域、导弹拦截控制系统、航空器对接技术等方面具有广阔的开发利用前景。3.意义倒立摆是一种典型的快速、多变量、非线性、绝对不稳定系统.人们试图寻找同的控制方法以实现对倒立摆的控制,以便检验或说明该方法对严重非线性和绝对不稳定系统的控制能力。同时,由于摩擦力的存在,该系统具有一定的不确定性。对这样一个复杂系统的研究在理论上将涉及系统控制中的许多关键问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等都可以以它为例进行研究。二.被控对象的模型为简化问题,工程上往往忽略一些次要因素。这里,忽略摆杆质量、执行电动机惯性以及摆轴、轮轴、轮与接触面之间的摩擦及风力。设小车瞬时位置为z,倒置摆出现的偏角为θ,则摆心瞬时位置为(z+lsinθ)。在控制力u的作用下,小车及摆均产生加速运动,根据Mumlθz牛顿第二定律,在水平直线运动方向的惯性力应与控制力u平衡,则有ulzdtdmdtzdM)θsin(2222即uθsinθml-θcosθ)(2mlzmM(1)由于绕摆轴旋转运动的惯性力矩与重力矩平衡,因而有mglsinθθcos)]θsin([22llzdtdm即sincossincoscos22gllz(2)式(1)、式(2)两个方程都是非线性方程,需作线性化处理。由于控制的目的是保持倒置摆直立,因此,在施加合适u的条件下,可认为、均接近零,此时sin≈,cos≈1,且可忽略2项,于是有umlzmM)((3)glz(4)联立求解式(3)、式(4),可得uMMmgz1(5)uMlgMlmM1)((6)消去中间变量,可得输入变量为u、输出变量为z的系统微分方程为uMlguMzMlgmMz1)()4((7)在此问题中,设上述两变量的论域为221x和sradxsrad552,则设计步骤为第1步。首先,对1x在其论域上建立三个隶属度函数,即如图1所示的正值(P)、零(Z)和负值(N)。然后,对2x在其论域上亦建立3个隶属度函数,即图2所示的正值(P)、零(Z)和负值(N)。图2-3输入1x的分区图2-4输入2x的分区第2步。为划分控制空间(输出),对ku在其论域上建立5个隶属度函数,2424ku,如图3(注意,图上划分为7段,但此问题中只用了5段)。图2-5输出u的分区第3步。用表1所示的3*3规则表的格式建立9条规则(即使我们可能不需要这么多)。本系统中为使倒立摆系统稳定,将用到和dtd。表中的输出即为控制作用u(t)。X1x2PZNPPBPZZPZNNZNNB表1模糊控制规则表第4步。我们可用表1中规则导出该控制问题的模型。并用图解法来推导模糊运算。假设初始条件为101x和sradx402然后,我们在上例中取离散步长30k,并用矩阵差分方程式导出模型的四部循环式。模型的每步循环式都会引出两个输入变量的隶属度函数,规则表产生控制作用u(k)的隶属度函数。我们将用重心法对控制作用的隶属度函数进行精确化,用递归差分方程解得新的1x和2x值为开始,并作为下一步递归差分方程式的输入条件。分别为1x和2x的初始条件。从模糊规则表(表1)有If(1x=P)and(2x=Z),then(u=P)If(1x=P)and(2x=N),then(u=Z)If(1x=Z)and(2x=Z),then(u=Z)If(1x=Z)and(2x=N),then(u=N)表示了控制变量u的截尾模糊结果的并。利用重心法精确化计算后的控制值为u=-2。在已知u=-2控制下,系统的状态变为3001211xxx10001212uxxx依次类推,可以计算出下一步的控制输出u(1)。模糊控制器能够满足倒立摆的运动控制。三、模糊控制器的建立3.1在MTALAB中的fuzzy控制器的建立与封装在命令窗口中输入:fuzzy然后回车可得出如下图所示:图3-1模糊控制器设置界面然后对其各个变量进行设置其步骤如下图3-2:对输入变量X1进行设置如下图3-3所示:变量X2的设置如下图3-4所示:输出量的设置图3-5所示:模糊规则控制表的设置如下图3-6所示:设置出来的效果图如图3-7(a),(b),(c)所示:(a)(b)(c)3.2最终在MATLAB中的搭建出来的框图如下:图3-8单级倒立摆在MTALAB中simulink仿真的框架图主要的状态空间模块的参数设置如下:四、仿真结果以及分析通过(fuzzy)模糊控制模块,可以和包含模糊控制器的fis文件联系起来,还可以随时改变输入输出论域,隶属度函数以及模糊规则。仿真结果如下图:图4-1和图4-2。图4-1分析如下:从图4-1仿真图中可以看出,仿真时间大概在1秒左右趋于平衡,但是图中曲线最终稳定在-2.3左右,而不是在0附近稳定,猜想曲线应该最终稳定于0附近。图4-2分析如下:图4-1从图4-2仿真图中可以看出,仿真时间大概也在1秒左右趋于平衡,图中曲线最终稳定在0.3左右,接近于0附近稳定,基本实现了仿真预期效果。五、结语通过以上仿真实践的过程可以看出,对于倒立摆一类的包含非线性以及不稳定因素的控制系统模型,采用模糊控制的方法具有很强的适应性以及理想的控制效果,在此基础上,选用恰当的隶属度函数也是实现优化控制的重要条件。在实际应用中,由于模型往往具有更多的复杂因素以及一些不可预测的干扰因素,所以有时需要简历更复杂的模糊控制方案以及更加精确的隶属度函数,有时也需要采用神经网络的算法结构来解决这样的实际问题,这些方法互相配合从而形成了较为完备的智能控制方案系统。参考文献:[1]韩力群.智能控制理论及应用[2]胡寿松.自动控制原理简明教程[3]陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2003.[4]孙红兵,李生权,王瑜.基于RBF网络二级倒立摆系统PID控制[J].微计算机信息,2007(6):72-75.[5]刘豹.现代控制理论[M].北京:机械工业出版社,1992.[4]陈桂明,等.应用Mat]ab建模与仿真[M].北京.科学出版社,2000.[5]闻新,等模糊逻辑工具葙的分析与应用[M]北京,科学出版社.2000.[6]张志涌.精通MATLAB[M].(第三版).北京:北京航空航天大学出版社,2000.
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 神枫小子
神枫小子
本文标题:模糊控制课程设计
链接地址:https://www.777doc.com/doc-1850672 .html