您好,欢迎访问三七文档
当前位置:首页 > 建筑/环境 > 电气安装工程 > 霍尔传感器在电动车中的应用及维护
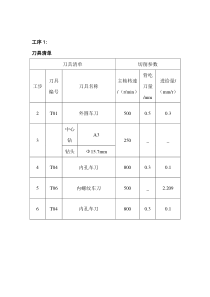
霍尔传感器在电动车中的应用随着科技事业的突飞猛进,当今社会的人们对享受科学技术带来的便捷生活要求是越来越高,因此也对科学技术的再发展提出了更高更好的要求。机电一体化技术发展就是科技发展道路上的一个时代,这也是一种必然的发展趋势,为以后更高级更全面的技术发展提供了铺垫。电动车是一种非常伟大的机电一体化的发明之一。它解放了人类的脚,不再需要人力脚蹬车,以电动力来驱动车子的前进。它是一种安全、经济、清洁的绿色交通工具,不仅在能源、环境方面有其独特的优越性和竞争力。为了真正能够更方便地采用现代控制技术实现其机电一体化的目标,就必须做好关键的细节技术问题,而传感器就是一个非常好的反馈信息的电子器件,正因为在电动车中有传感器的存在,才使得电动车能够有序的稳定的安全向前行驶。霍尔传感器仅是传感器大家庭中的一分子,它类属于磁敏传感器,用它们可以检测磁场及其变化,可在各种与磁场有关的场合中使用。而在电动自行车中是有多处利用了霍尔传感器,如调速转把,刹把,以及无刷电机中等。电动车调速转把调速转把顾名思义是电动车的调速部件,这是一种线性调速部件,样式很多但工作原理是一样的。它一般位于电动车的右边,既骑行时右手的方向,电动车转把的转动较度范围在0—30度制之间。转把与闸把的信号特征:1.转把的形式、信号特征及其信号改制电动车的转把有3根引线:分别是电源(细红+5V),地线(细黑),转把调速信号线(线形连续变化信号细绿)。电动车上使用的转把有光电转把和霍耳转把两种,目前采用霍耳转把的电动车占绝大多数。霍耳转把的内部电路如图:常见线性霍尔元件型号有AH3503AH49EA3515A3518SS495如AH3503线性霍尔电路由电压调整器,霍尔电压发生器,线性放大器和射极跟随器组成,其输入是磁感应强度,输出是和输入量成正比的电压。静态输出电压(B=0GS)是电源电压的一半左右。S磁极出现在霍尔传感器标记面时,将驱动输出高于零电平;N磁极将驱动输出低于零电平;瞬时和比例输出电压电平决定与器件最敏感面的磁通密度。提高电源电压可增加灵敏度。产品特点:体积小、精确度高、灵敏度高、线性好、温度稳定性好、可靠性高霍耳转把输出电压的大小,取决于霍耳元件周围的磁场强度。转动转把,改变了霍耳元件周围的磁场强度,也就改变了霍耳转把的输出电压。在电动车上使用的霍耳转把的信号有以下几种:转把的种类输出电压正把/5V供电反把/5V供电单霍耳转把1.1-4.2(最多)4.2-1.1(少量)单霍耳转把2.6-3.7(极少)3.7-2.6单霍耳转把1-2.52.5-1单霍耳转把2.5-44-2.5双霍耳转把0-55-0光电转把0-5(少量)5-0其中最常用的是以下两种信号的转把:1-4.2V(俗称正把),4.2-1V(俗称反把)。两种信号的转把中,是1.0V~4.2V的转把占绝大多数。其它输出电压的转把,目前市场中存在很少,已成为事实中的非标产品,这种非标的转把在早期的电动车上使用比较多。因此目前市场上通用的控制器绝大多数是识别1-4.2V转把信号的产品。当电动车的转把或控制器需要维修更换时,一旦遇到转把信号与控制器不匹配的情况时,这就需要对转把进行改制,使其输出信号能匹配控制器。转把输出信号改制:将转把拆开,改变转把里面磁钢工作面的极性,就可以改变转把输出的电位。如果转把内有两个磁钢,分别将两个磁钢都转180°,再装好;如果转把内只有1个磁钢,将磁钢取出,反转180°后,装好转把,这样就改变了转把里面霍耳元件工作磁场的起始位置,从而实现了转把输出信号的改制。如图:调速转把实物图锁定转把的转把上加了一个机械开关按钮,可以在控制器的控制下作为模式转换按钮,用于1:1助力,电动,定速,故障自检的模式转换。电动车刹把转把信号是电动车电机旋转的驱动信号,刹信号是电机停止转动的制动信号。电动车标准要求电动车在刹车制动时,控制器应能自动切断对电机的供电。因此电动车闸把上应该有闸把位置传感元件,在有捏刹车把动作时,将刹车信号传给控制器,控制器接受到刹车信号后,立即停止对电机的供电。电动车闸把的位置传感元件有机械式微动开关(分机械常开和机械常闭两种)和开关型霍耳感应元件(分刹车低电位和刹车高电位两种)两种。机械开关型有两条引线一条接负极另一条接断电线,适用于低电平刹车控制器。对于支持高电平刹车的控制器为一条接+12V,另一条接断电线。霍耳型三条引出线分别:刹车线(细蓝+5V),负极(细黑),剩余的一条为断电线。常见单极性开关霍尔元件型号的型号有:AH41AH3144A3144A3282其典型内部电路如下:12345开关霍耳元件电路原理图内部均有5个部分,即由稳压源(1)、霍尔电势发生器(2)、差分放大器(3)、数字电路或触发器(4)以及输出级(5)组成。一般机械常开的刹车信号是常高电位,当刹车时,闸把内部的微动开关闭合,其信号变成低电位。一般机械常闭的刹车信号是常低电位,当刹车时,闸把内部的微动开关打开,其信号变成高电位一般电子低电位闸把的刹车信号是常高电位,当刹车时,闸把内部的霍耳元件信号翻转,其信号变成低电位。一般电子高电位闸把的刹车信号是常低电位,当刹车时,闸把内部的霍耳元件信号翻转,其信号变成高电位。刹车信号高低电位的变化,是控制器识别电动车是否处于刹车状态,从而判断控制器是否给电机供电。当电动车的闸把或控制器需要维修更换时,会遇到闸把信号与控制器不匹配的情况时,这就需要对闸把进行改制,使其输出信号能匹配控制器。因此在维修实践中,不论刹把的形式如何,也不论控制器识别何种刹车信号,应做到能对各种形式的刹车信号进行适当改进,以匹配成控制器能识别的信号。无刷电机电动助力车大都使用轮毂电机,即把电机做成轮毂的样子,直接驱动后轮,从而降低成本,且可提高其电能与机械能的转换效率。现在的电动助力车,一般都采用如下三种电机:高效低速稀土永磁直流无刷电机、高效低速永磁直流有刷电机、高效高速稀土永磁直流有刷电机。直流电机在转动过程中,绕组中的电流要不断地改变方向,以使转子向一个方向转动。其中,有刷电机是采用电刷与换相器通过机械接触的方式进行换相的;而无刷电机则是通过hall-sensor检测出绕组实时运转位置的信号,再通过微处理器或专用芯片对采集的信号进行处理,并实时控制相应的驱动电路对电机绕组进行控制。由于无刷电机的换相是通过传感器及相关电路进行的,所以这种电机没有电刷与换相器的机械接触与磨损,不需要经常换电刷等易损器件,从而可有效提高电机的使用寿命,减少维修费用。同时,由于无刷电机没有电刷与换相器之间的摩擦,所以在换相期间没有电火花产生,这样将大大减小对整机控制系统的干扰。但是,由于无刷电机的电流换相需要专门的电路进行控制,所以整个控制电路将会比较复杂。如下图:无刷电机工作原理图直流无刷电机的基本控制原理要让电机转动起来,首先控制部就必须根据hall-sensor感应到的电机转子目前所在位置,然后依照定子绕线决定开启(或关闭)换流器(inverter)中功率晶体管的顺序,如下inverter中之AH、BH、CH(这些称为上臂功率晶体管)及AL、BL、CL(这些称为下臂功率晶体管),使电流依序流经电机线圈产生顺向(或逆向)旋转磁场,并与转子的磁铁相互作用,如此就能使电机顺时/逆时转动。当电机转子转动到hall-sensor感应出另一组信号的位置时,控制部又再开启下一组功率晶体管,如此循环电机就可以依同一方向继续转动直到控制部决定要电机转子停止则关闭功率晶体管(或只开下臂功率晶体管);要电机转子反向则功率晶体管开启顺序相反。基本上功率晶体管的开法可举例如下:AH、BL一组→AH、CL一组→BH、CL一组→BH、AL一组→CH、AL一组→CH、BL一组,但绝不能开成AH、AL或BH、BL或CH、CL。此外因为电子零件总有开关的响应时间,所以功率晶体管在关与开的交错时间要将零件的响应时间考虑进去,否则当上臂(或下臂)尚未完全关闭,下臂(或上臂)就已开启,结果就造成上、下臂短路而使功率晶体管烧毁。无刷电机控制原理图当电机转动起来,控制部会再根据驱动器设定的速度及加/减速率所组成的命令(Command)与hall-sensor信号变化的速度加以比对(或由软件运算)再来决定由下一组(AH、BL或AH、CL或BH、CL或……)开关导通,以及导通时间长短。速度不够则开长,速度过头则减短,此部份工作就由PWM来完成。PWM是决定电机转速快或慢的方式,如何产生这样的PWM才是要达到较精准速度控制的核心。高转速的速度控制必须考虑到系统的CLOCK分辨率是否足以掌握处理软件指令的时间,另外对于hall-sensor信号变化的资料存取方式也影响到处理器效能与判定正确性、实时性。至于低转速的速度控制尤其是低速起动则因为回传的hall-sensor信号变化变得更慢,怎样撷取信号方式、处理时机以及根据电机特性适当配置控制参数值就显得非常重要。或者速度回传改变以encoder变化为参考,使信号分辨率增加以期得到更佳的控制。电机能够运转顺畅而且响应良好,P.I.D.控制的恰当与否也无法忽视。之前提到直流无刷电机是闭回路控制,因此回授信号就等于是告诉控制部现在电机转速距离目标速度还差多少,这就是误差(Error)。知道了误差自然就要补偿,方式有传统的工程控制如P.I.D.控制。但控制的状态及环境其实是复杂多变的,若要控制的坚固耐用则要考虑的因素恐怕不是传统的工程控制能完全掌握,所以模糊控制、专家系统及神经网络也将被纳如入成为智能型P.I.D.控制的重要理论。以上简述了无刷电机的基本工作的原理和方式,然而作为反馈信息的hall-sensor,它是如何帮助电机实现无刷换相的呢?hall-sensor的信号线传递电机里面磁钢相对于线圈的位置,根据三个hall-sensor的信号控制器能知道此时应该如何给电机的线圈供电(不同的hall-sensor信号,应该给电机线圈供相对应方向的电流),就是说hall-sensor状态不一样,线圈的电流方向不一样。hall-sensor信号传递给控制器,控制器通过粗线(不是霍耳线)给电机线圈供电,电机旋转,磁钢与线圈(准确的说是缠在定子上的线圈,其实hall-sensor一般安装在定子上)发生转动,hall-sensor感应出新的位置信号,控制器粗线又给电机线圈重新改变电流方向供电,电机继续旋转(线圈和磁钢的位置发生变化时,线圈必须对应的改变电流方向,这样电机才能继续向一个方向运动,不然电机就会在某一个位置左右摆动,而不是连续旋转),这就是所谓的无刷电机的电子换相。控制器是电动车的大脑,能实现电动车的所有功能,如转把调速,刹车断电,1:1助力,巡航锁定,欠压保护以及内部控制如过热保护,过流保护,缺相保护等。而简略地讲控制器是由周边器件和主芯片(或单片机)组成。如下图:(控制器内部结构)。周边器件是一些功能器件,如执行、采样等,它们是电阻、传感器、桥式开关电路,以及辅助单片机或专用集成电路完成控制过程的器件;单片机也称微控制器,是在一块集成片上把存贮器、有变换信号语言的译码器、锯齿波发生器和脉宽调制功能电路以及能使开关电路功率管导通或截止、通过方波控制功率管的的导通时间以控制电机转速的驱动电路、输入输出端口等集成在一起,而构成的计算机片。这就是电动自行车的智能控制器。它是以“傻瓜”面目出现的高技术产品。控制器的设计品质、特性、所采用的微处理器的功能、功率开关器件电路及周边器件布局等,直接关系到整车的性能和运行状态,也影响控制器本身性能和效率。不同品质的控制器,用在同一辆车上,配用同一组相同充放电状态的电池,有时也会在续驶能力上显示出较大差别。控制器内部结构图目前,电动自行车所采用的控制器电路原理基本相同或接近。有刷和无刷直流电机大都采用脉宽调制的PWM控制方法调速,只是选用驱动电路、集成电路、开关电路功率晶体管和某些相关功能上的差别。元器件和电路上的差异,构成了控制器性能上的不大相同。控制器从结构上分两种,我们把它称为分离式和整体式。1、分离式所谓分离,是指控制器主体和显示部分分离。后者安装在车把上,控制器
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 84jasper
84jasper
本文标题:霍尔传感器在电动车中的应用及维护
链接地址:https://www.777doc.com/doc-1975851 .html