您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 管理学资料 > 关于ADVISOR的纯电动模块介绍
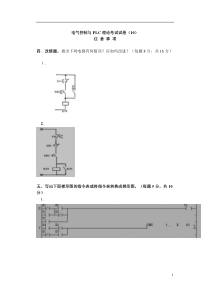
ADVISOR(AdvancedVehicleSimulator)高级车辆仿真器是美国国家可再生能源实验室开发的一款著名的电动汽车仿真软件。主要用于EV、HEV及FCEV的仿真研究工作,同时兼具对CV的仿真功能。其内部程序由模块化的Matlab/Simulink语言编写而成,提供了多种可供选择的电动汽车整车模型及灵活可修改的部件模型库。可对选定车辆的整车燃油经济性、排放、加速时间、最大爬坡度等进行仿真计算,并且能与其它多种软件共同仿真。人性化的GUI操作界面大大简化了用户的操作难度。通过修改部件模型或控制策略,还可实现对特定车型的优化计算。目前已成为电动汽车仿真研究首选的工具。基于ADVISOR的纯电动汽车仿真模型的建立对于纯电动汽车ADVISOR设计了整车(Vehicle)、车轮/车轴(Wheel/Axle)、主减速器(Finaldrive)、能量储存系统(EnergyStorageSystem,简称ESS,用于存储电能的设备,如蓄电池)和电动机(Motor)可控制策略等多个部件的仿真模型(图)所示。1循环仿真工况的选择(运行界面如图1)ADVISTOR提供了道路循环(DriveCycle)、多重循环(MultipleCycle)和测试过程(TextProcedure)三种仿真工况来仿真车辆的性能。①道路循环提供了CYC_ECE、CYC_FTP和CYC_1015等56中国外标准道路玄幻提供用户选择,另外提供了行程设计器(Tripbuilder)可以将多达八种步通的道路循环任意组合在一起,综合仿真车辆的性能。②多重循环功能可以用批处理的方式以相同的初始条件,快速计算和保存不同的道路循环情况下的仿真结果,并将它们显示在一起,供用户进行比较。③测试过程包括TEST_CITY_HWY和TEST_FTP等八个国外标准的测试过程供用户选择。2车辆模块的仿真如图2所示,ADVISOR中车辆模块的输入量为仿真步长结束时的速度和系统可提供的驱动力和线速度,根据车辆驱动力与行驶阻力平衡方程(滚动阻力、坡度阻力、空气阻力和加速阻力模块)得到输出量,即车轮所需要的驱动力和速度。车辆模块中需要定义的参数包括:veh_description=’CA6700Vehicle’;%定义汽车描述变量veh_CD=0.56;%定义风阻系数veh_FA=5.35;%定义迎风面积,单位:(m^2)veh_cg_height=0.735;%定义质心高度,单位(m)veh_front_wt_frac=0.4;%定义前轴荷占整车质量的百分比veh_wheelbase=3.935;%定义轴距,单位:(m)veh_glider_mass=3190;%定义车辆滑行质量(kg)veh_cargo_mass=1950;%定义最大装载质量(包括乘员),单位:kg2.1行驶阻力模型行驶阻力模型,即整车动力学模型。它是在向后仿真中以工况车速为输入,以所需牵引力和车速为输出,在向前仿真中,以可以得到的实际牵引力为输入,并在此模型中计算出实际可以得到的车速。其整车动力学模型如图2.1所示。实际车速将作为跟踪车速与目标车速进行对比,来评价在一个工况情况下所选电机和电池参数是否达到工况要求。实际车速的仿真模型如图2.2所示。3车轮模块的仿真图3是ADVISOR中车轮模块系统结构图。左侧为模块的输入端,包括变量1、2,分别对应右侧的两个输出量。模块中主要有两条运算路线(这个特点在后面的模块中也很普遍),一条是根据下级模块的需求运算得到上级模块的需求,即“需求路线”;另一条是由上级模块发出的功率到下级模块得到的实际功率(“实际路线”)。在需求路线中,模型从车轮所需的驱动力和转速通过牵引力控制接口和轮胎滑移率模块计算传动系应提供的转矩和转速。在实际路线中,传动系提供的转矩和转速通过前/后制动控制接口和轮胎滑移率等模块计算出车轮获得的牵引力和线速度。车轮模块中需要定义的参数有:wh_radius=0.385;%定义车轮滚动半径,单位:(m)wh_inertia=40*wh_radius^2/2;%定义轮胎的转动惯量,单位:(kg*m^2)wh_1st_rrc=0.00938;%定义轮胎的滚动主力系数3.1轮胎驱动力模型轮胎是汽车中一个复杂的系统,在汽车行驶中它既受纵向力又受侧向力,并影响着汽车的操纵稳定性。本文在建模过程中,只考虑了轮胎的纵向力,并假设轮胎是刚性物体,忽略了汽车行驶过程中的惯性损失,只建立了轮胎的驱动力模型。如图3.1所示,该模型主要包括:附着力限制子模块和制动力分配子模块。1.附着力限制子模块该模块主要是对纯电动汽车在加速和等速过程中,整车需求的牵引力和驱动系统可提供的牵引力进行限制。牵引力限制模型如图3.1.1所示2.制动力分配子模块该模块主要是对纯电动汽车在减速过程中的制动力进行分配,考虑到制动过程中的电动机制动,制动力分为:前后轮机械制动力和前轮电动机制动力。本模块中的制动力分配策略按照ADVISOR2002中制动力分配策略的思想建立,即:前轮机械制动力分配系数和前轮电机制动力分配系数由车速输入信号确定。制动力分配模块如图3.1.2所示ADVISOR中的主减速器模块如图4所示。在需求路线中该模块根据车轮的需求转矩和转速,考虑损耗和惯性作用等因素后计算出对上级(变速器)模块的转矩和转速需求。而实际路线则由变速器提供的转矩和转速计算出主减速器实际输出的转矩和转速。ADVISOR中主减速器模块的参数在变速器模块中定义。4主减速器模块的仿真5变速器模块的仿真图5为ADVISOR中的变速器模块,与主减速器模块类似,通过需求路线和实际路线分别得到了变速器输入端所需转矩和转速(对电动机的要求)和变速器实际输出的转矩和转速。变速器模块中需要定义的参数包括:gb_ratio=[1.46];%定义变速器各档速比gb_gears_num=max(size(gb_ratio));%定义变速器档位数gb_mass=120;%定义变速器质量,单位;(kg)fb_ratio=6.167;%定义主减速器速比fb_mass=50;%定义主减速器质量,单位:(kg)6电动机模块的仿真图6所示的电动机模块中,程序根据转子所需转矩和转速通过电动机转速预估程序,考虑了惯性作用和转矩限制等影响因素,在参考电动机输出功率Map图的基础上计算得到电动机所需的输入功率。在实际路线中通过可得到的电动机输入功率求出转子可得到的驱动转矩和转速。电动机模块中需要定义的参数包括:mc_map_trq=[-239.0-221.0-190.3-172.7-159.2-145.6-132.0-118.5-99.9-89.4-77.8-64.2-49.7-34.1-19.60.019.634.149.764.277.889.499.9118.5132.0145.6159.2172.7190.3221.0239.0];%定义电动机的转矩范围•mc_map_spd=[04008001200160020002400280032003600400044004800520056006000];%定义电动机的转速范围•mc_max_trq=[239239239239239239239239239239214.9195.3179.04165.3153.5143.235];%定义电动机不同转速下的最大转矩,单位:(Nm)•mc_max_crrnt=385;%定义电动机的最大电流,单位:(A)•mc_min_volts=200;%定义电动机的最低工作电压,单位(V)•mc_mass=125;%定义电动机的质量,单位:(kg)图7所示为能量存储(电池)模块系统结构图,根据功率总线的功率需求该模块通过三个子模块(电池组电压/内阻模块、功率限制模块和电流值计算模块)计算出功率总线实际得到的功率,并通过SOC算法子模块计算得到SOC值变化曲线。电池组电压/内阻模块(packVcc.Rint)。该子模块输入总线功率需求、SOC值和电池组温度,根据SOC-温度-电压曲线和SOC-温度-电阻曲线,计算出某时刻电池组的端电压和内阻。功率限定模块(limitpower)。模块根据电池组能提供的最大电压和电机控制器要求的最小电压来限定电池组的电压值。根据公式(E-U)U/r-0.1来求电池放电的最大功率,其中公式中E为电池开路电压,U为工作限值电压,r是电池组内阻,0.1是安全保护值,由电池SOC值、电池最大放电功率、允许放电功率的电压限值得到电池组的输出电压限值。7能量存储(电池)模块的仿真电流计算模块(computecurrent).该模块根据总线功率需求、电池的电压和内阻以及功率限定模块中得到的功率限值,利用公式和(E-Umax)/r分别求电流限值,再进行比较取较小值,此值为实际允许电流输出。最后利用公式E-Ichar来计算此时的输出电压。电池模块中需要定义的参数包括:⑴ess_max_ah_cap=[250280300];%定义电池容量随SOC值随温度的变化⑵ess_r_dis=[0.04190.02880.02210.0140.01450.01450.0162;0.0720.015150.008390.004930.005050.0055240.005722;0.05350.01330.00820.00590.00590.0060.0063];%定义电池的放电电阻,单位:(ohm)rrUUErEErrPEE2/)[(42422⑶ess_r_chg=[0.0210.0180.01770.01570.01380.01380.015;0.01240.00680.0054260.004420.004630.005830.00583;0.01040.00790.00720.00640.00590.00580.006];%定义电池的充电电阻,单位:(ohm)⑷ess_voc=[4.134.093.974.054.113.964.00;3.894.164.144.133.983.913.898;4.1284.1363.944.1284.1623.9613.899];%定义电池的端电压,单位(V)ess_min_volts=2*87;%定义电池的最小电压,单位:(V)ess_max_volts=4.25*87;%定义电池的最大电压,单位:(V)ess_module_mun=87;%定义电池的数量ess_module_mass=9;%定义电池的质量,单位:(kg)ADVISOR提供了并联电辅助驱动式控制策略(ParrallelElectricAssist)、自适应控制策略(AdaptiveControlSrategy)、模糊逻辑控制策略(FuzzyLogicStrategy)和本田insight控制策略等6种控制策略模块。用户还可以通过在ADVISOR的Simulink模型中输入控制策略模型或使用GUI修改控制参数来设计自己的控制策略。8设计控制策略谢谢!整车动力学模型车辆实际速度计算模型轮胎驱动力模型牵引力限制模型制动力分配模块变速器仿真模型
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 yangjunnihao
yangjunnihao
本文标题:关于ADVISOR的纯电动模块介绍
链接地址:https://www.777doc.com/doc-2001788 .html