您好,欢迎访问三七文档
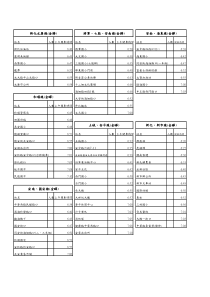
热工控制理论与技术学院能源与环境学院学号150376姓名潘晗指导老师张雨飞课后作业1.1:1、在内部扰动作用下,Kp的大小,对稳定性、稳态误差、过渡过程如何影响?2、在外部扰动、设定值扰动时,Kp的大小,对稳定性、稳态误差、过渡过程如何影响。受控对象分别采用二阶有自平衡和无自平衡。解答:仿真对象:1.二阶有自平衡:021(s)(12s)G2.二阶无自平衡:021(s)s(12s)G(1)Simulink仿真模型:二阶有自平衡:二阶无自平衡:(2)响应曲线:1、内扰作用:有自平衡:Kp↑调节速度快,总体动态偏差小,稳态误差小,稳定性较差无自平衡:Kp↑调节速度快,总体动态偏差小,稳态误差小,稳定性较差2、给定值扰动:有自平衡:Kp↑调节速度快,总体动态偏差小,稳态误差小,稳定性较差无自平衡:Kp↑调节速度快,总体动态偏差小,稳定性较差3、外扰动作用:有自平衡:Kp↑调节速度快,总体动态偏差小,稳态误差小,稳定性较差无自平衡:Kp↑调节速度快,总体动态偏差小,稳定性较差(3)总结Kp增大,调节作用增强,总体动态偏差减小,系统稳定性变差,稳态误差变小。并且,对于无自平衡对象,在给定值扰动以及外扰时稳态误差为0。但是,内扰情况下不可能实现稳态误差为0.课后作业1.2:PID控制。使用matlab的simulink,进行控制仿真:(1)改变Kp、Ti、Td的大小,对稳定性、稳态误差、过渡过程的影响怎样?受控对象分别采用二阶有自平衡和无自平衡。(2)改变对象的增益值k,观察对控制过程的影响。对象为:二阶有自平衡:021(s)(12s)G二阶无自平衡:021(s)s(12s)G(3)改变对象的阶次,n=3,n=4,…,观察控制效果,得出结论。simulink仿真图一、二阶有自平衡对象:1、保持Ti=2,Td=1不变,调节Kp使之分别等于1,3。结论:Kp↑调节速度快,总体动态偏差小,稳态误差小。2、保持Kp=1,Td=1不变,调节Ti使之分别等于0.5,2。结论:Ti↑调节速度慢,快速性变差,稳态误差变大,稳定性变好。3、保持Kp=1,Ti=2不变,调节Td使之分别等于0.5,2。结论:Td增加可以加快调节作用的速度,增强稳定性,减小总体动态偏差。4.改变对象增益,Kp=1,Ti=2,Td=0.5。结论:对象增益K1的增大,使得快速性变好,稳定性变好。5.改变对象阶次,Kp=1,Ti=0.5,Td=5,n=2/3/4。结论:对象阶次的增高使得稳定性变差,快速性变差,过渡过程时间长。二、二阶无自平衡对象:1、结论:Kp↑,调节速度快,稳定性较差。2、结论:Ti↑,难以调平。3.结论:Td增大,总体动态偏差减小,快速性变好,稳定性增强,稳态误差增大。课后作业1.3:PID控制编程实现,用MFC++6.0或.m编程。受控对象分别采用二阶有自平衡和无自平衡。仿真时,对象也需要离散化,采用后向差分。102102001020()(Ts1)1()T(Ts1)aaKGsGss,有自平衡K=2,T=2,无自平衡T=2,T=1(1)用Z变换对象离散化有自平衡对象:120(s)(s)(1s)KyuT12221200000222()()(12)(22)KyzTTTTTuzZZTTTTT222000001222(12)()(22)(1)(2)()TTTTTykykykKukTTTTT22000221222000000222(22)(k)()(1)(2)(12)(12)(12)TTTKTTTyukykykTTTTTTTTTTTT无自平衡对象:120(s)(s)s(1s)aKyuTT12110(z)(z)11()1()aKyuZZTTTT222230000032220000000(34)32(k)()(1)(2)(3)(12)(12)(12)TTTTTTTTTyukykykykTTTTTTTTTT(2)MATLAB程序clf;clear;T0=1.5;k1=1;k2=1;T=0.04;kp=1;Ti=1.5;Td=3;kp2=1;Ti2=1.5;Td2=3;k11=kp*(1+Td/T+T/Ti);k12=-kp*(1+2*Td/T);k13=kp*Td/T;ky1=k1/(1+2*T0/T+T0*T0/T/T);ky2=(2*T0/T+2*T0*T0/T/T)/(1+2*T0/T+T0*T0/T/T);ky3=(T0*T0/T/T)/(1+2*T0/T+T0*T0/T/T);k21=kp2*(1+Td2/T+T/Ti2);k22=-kp2*(1+2*Td2/T);k23=kp2*Td2/T;kw1=k2*T^3/(T*T+T0*T0+2*T0*T);kw2=(T*T+3*T0*T0+4*T0*T)/(T*T+T0*T0+2*T0*T);kw3=(3*T0*T0+2*T0*T)/(T*T+T0*T0+2*T0*T);kw4=(T0*T0)/(T*T+T0*T0+2*T0*T);r=1;e=zeros(2,3);u=zeros(2,2);y=zeros(2,4);a=zeros(2,100/T);fori=1:100/Ta(1,i)=y(1,1);e(1,1)=r-y(1,2);u(1,1)=u(1,2)+k11*e(1,1)+k12*e(1,2)+k13*e(1,3);e(1,3)=e(1,2);e(1,2)=e(1,1);y(1,1)=ky1*u(1,1)+ky2*y(1,2)-ky3*y(1,3);u(1,2)=u(1,1);y(1,3)=y(1,2);y(1,2)=y(1,1);a(2,i)=y(2,1);e(2,1)=r-y(2,2);u(2,1)=u(2,2)+k21*e(2,1)+k22*e(2,2)+k23*e(2,3);e(2,3)=e(2,2);e(2,2)=e(2,1);y(2,1)=kw1*u(2,1)+kw2*y(2,2)-kw3*y(2,3)+kw4*y(2,4);u(2,2)=u(2,1);y(2,4)=y(2,3);y(2,3)=y(2,2);y(2,2)=y(2,1);endfori=1:100/TA(1,i)=T*i;endplot(A,a(1,:));holdon;plot(A,a(2,:),'--');legend('ÓÐ×Ôƽºâ','ÎÞ×Ôƽºâ');xlabel('t');ylabel('y');gridon课后作业1.4:过热汽温串级控制系统仿真,系统对象结构如图。导前对象(ºC/kg/s)惰性对象(ºC/ºC)50%负荷,D=242.2kg/s23.067(125)s71.119(142.1)s100%负荷,D=527.8kg/s20.815(118)s61.276(118.4)s分别在内扰(给水流量)、外扰、设定值扰动时,仿真控制过程。主调PID,付调PI。解答:仿真控制模型:PID控制器:P+I*(1/s)+D*sPI控制器:P+I*(1/s)50%负荷控制器参数:主调PID:P=0.3709745I=0.00279D=0.00001副调PI:P=-137I=-0.002100%负荷控制器参数:主调PID:P=0.619I=0.0053D=-27.55副调PI:P=-1.982I=-0.017各种扰动下系统响应曲线(黄色曲线为50%负荷时的曲线,紫色曲线为100%负荷时的曲线):1、给定值扰动仿真控制过程:2、内扰仿真控制过程:3、外扰下仿真控制过程课后作业2.1:推导饱和放大器的描述函数。放大倍数k,饱和值D。使用饱和放大器,控制一个4阶象:41(s)(1)kWTs求(1)求系统稳定时k·k1是多少?(2)若k·k1=15,T=10s,判断系统是否发生自持震荡?A=?W=?kD-D解答:①AD2101220011()sin()444()sin()sinsin()sin()bytwtdwtytwtdwtkAwtwtdwtkDwtdwt1sinAD21112sin,cos1,arcsinDDDAAA221222241[(arcsin1)1]22(arcsin1)DDDDbAkkDAAAAkDDADAA21222(arcsin1)=arcsin22sin2(sincos)()224'=1+cos2=cos0+0+bkDDDNeAAAADAkkNekkNeNeNeAeAN令则对关故当增大时,于求导,得()且时,②AD1bAkNek(1)、=arcsinDA令22sin2(sincos)()2kkNe则224'=1+cos2=cos0kkNeNe对关于求导,得()+00NeANeA且故,增时当大时,11+111=1yquist0AANeNeADNeNekNk随增大,;当时,最大值为取最小值即时,此时当系统稳定时,曲线不包围点(,)4arctan1222()(1)jTkWjeT12224arctan1(1)TkkT得:1T14kk结论:当14kk是系统稳定;14kk系统临界稳定;14kk系统自持震荡。(2)4arctanT1222221(1)2(arcsin1)kTkDDDAAA1=1510kkT,=0.1/s0.21DA课后作业2.2:(1)求非线性调节器的描述函数Ne(A)(AD)。(2)画出-1/Ne稍精确曲线与对象频率特性曲线,并对系统稳定性进行说明。(3)若C=4,D=1,采用描述函数分析法,判断系统是否发生自持振荡;如发生,求自持振荡频率与幅值A。(4)分析参数D对该系统稳定性的影响。解答:(1)非线性过程是三位置继电器,关于原点对称,则a0=a1=0输入正弦波,输出如右图所示:11ybsinwt基波2210014()sin()()sin()bytwtdwtytwtdwt214sin()Cwtdwt14cosC2211sin,cosADAAD2214CADbA211241()baCDNejADAAAA(2)对象:34W(s)(110s)上图分别为-1/Ne随A的变化曲线以及对象的Nyquist曲线,(-0.5,0)是本例nyquist曲线和实轴的交点。在同一个图中表示如下:(3)C=4,D=121611NeAA221161ANeA221(),161AfANeA令232/221/1()161AAAAfAA则221.5(2)16(1)AAA2,()12,()AfAAfA单调递增;单调递增(2)0.393f为最小值3arctan(10)321.544()(110)(1100)jwWjwejww33arctan(10),10ww有:341(0.5,0)(110)2jejjw(与实轴交点)系统发生自持震荡12()0.5,2.2911,1.1115fAAA得到:0.1732rad/2.2911s自持震荡的频率和振幅分别为和(4)(-1/Ne)函数对A求导:22'3/2232223/222222223222222222221()(1/2)(1)(D)(2)A44144114124AADNeCADCAAAADCADCADAADCADADAADCADAD2DAD2AD2AD导数负0正-1/Ne增大极大值(2DC)减小结论:D越大,极大值点离(-0.5,0)越远,系统从自持振荡
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码

 matthew_01
matthew_01
本文标题:自动控制作业
链接地址:https://www.777doc.com/doc-2051119 .html