您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 经营企划 > 航天器制导与控制课后题答案(西电)
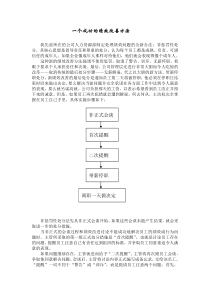
1.3航天器的基本系统组成及各部分作用?航天器基本系统一般分为有效载荷和保障系统两大类。有效载荷:用于直接完成特定的航天飞行任务的部件、仪器或分系统。保障系统:用于保障航天器从火箭起飞到工作寿命终止,星上所有分系统的正常工作。1.4航天器轨道和姿态控制的概念、内容和相互关系各是什么?概念:轨道控制:对航天器的质心施以外力,以有目的地改变其运动轨迹的技术;姿态控制:对航天器绕质心施加力矩,以保持或按需要改变其在空间的定向的技术。内容:轨道控制包括轨道确定和轨道控制两方面的内容。轨道确定的任务是研究如何确定航天器的位置和速度,有时也称为空间导航,简称导航;轨道控制是根据航天器现有位置、速度、飞行的最终目标,对质心施以控制力,以改变其运动轨迹的技术,有时也称为制导。姿态控制包括姿态确定和姿态控制两方面内容。姿态确定是研究航天器相对于某个基准的确定姿态方法。姿态控制是航天器在规定或预先确定的方向(可称为参考方向)上定向的过程,它包括姿态稳定和姿态机动。姿态稳定是指使姿态保持在指定方向,而姿态机动是指航天器从一个姿态过渡到另一个姿态的再定向过程。关系:轨道控制与姿态控制密切相关。为实现轨道控制,航天器姿态必须符合要求。也就是说,当需要对航天器进行轨道控制时,同时也要求进行姿态控制。在某些具体情况或某些飞行过程中,可以把姿态控制和轨道控制分开来考虑。某些应用任务对航天器的轨道没有严格要求,而对航天器的姿态却有要求。1.5阐述姿态稳定的各种方式,比较其异同。姿态稳定是保持已有姿态的控制,航天器姿态稳定方式按航天器姿态运动的形式可大致分为两类。自旋稳定:卫星等航天器绕其一轴(自旋轴)旋转,依靠旋转动量矩保持自旋轴在惯性空间的指向。自旋稳定常辅以主动姿态控制,来修正自旋轴指向误差。三轴稳定:依靠主动姿态控制或利用环境力矩,保持航天器本体三条正交轴线在某一参考空间的方向。1.6主动控制与被动控制的主要区别是什么?画出星—地大回路控制的结构图。主动控制与被动控制的主要区别是航天器的控制力和力矩的来源不同。被动控制:其控制力或力矩由空间环境和航天器动力学特性提供,不需要消耗星上能源。例如利用气动力或力矩、太阳辐射压力、重力梯度力矩,磁力矩等实现轨道或姿态的被动控制,而不消耗工质或电能。主动控制:包括测量航天器的姿态和轨道,处理测量数据,按照一定的控制规律产生控制指令,并执行指令产生对航天器的控制力或力矩。需要消耗电能或工质等星上能源,由星载或地面设备组成闭环系统来实现。2.1利用牛顿万有引力定律推导、分析航天器受N体引力时的运动方程,并阐述简化为二体相对运动的合理性。(1)解:牛顿万有引力定律:式中,Fg为由于质量引起的作用在质量m上的力矢量;r为从到m的距离矢量。万有引力常数G的值为G=6.670×10-13N·cm2/g2。如下图,对于N体问题,作用在第i个物体(假设即为航天器)上的合力称为,其表达式为其中:应用牛顿第二运动定律:把对时间的导数展开,得到式两边各项除以,就得出第i个物体的一般运动方程为上面方程是一个二阶非线性矢量微分方程,这种形式的微分方程是很难求解的。假定第i个物体的质量保持不变(即无动力飞行,=0),同时还假定阻力和其他外力也不存在。这样,惟一存在的力为引力,于是方程简化成(2)分析下表中的数据容易看出,围绕地球运行的航天器受到地球的引力占有主导地位,因此进一步简化运动方程式,简化N体问题是可能和合理的,这就是简化为二体相对运动的合理性。2gGMmrrrF总其他gFFF干扰其他阻力推力太阳压力FFFFF()总iidmdtvF总iiiiddmmdtdtvvF总iiiiimmmFrr31()njijijjijimGrrr总Fimim31()njijijjijimGrrr2.4比较航天器各种圆锥曲线轨道的参数a,c,e,p的特点,分析它们与轨道常数h和E之间的关系。所有的圆锥曲线均有两个焦点F和F。主焦点F代表中心引力体所在的位置,第二个焦点(或称虚焦点)F′,在轨道力学中没有什么意义。两个焦点间的距离以2c表示。对于圆,两个焦点重合,所以2c为零;对于抛物线,可认为虚焦点F′在无穷远处,所以2c为无穷大;对于双曲线2c取负值。通过两个焦点的弦长称为圆锥曲线的长轴,以2a表示,参数a称为长半轴或长半径。对于圆,2a就是直径;对于抛物线,2a为无穷大;对于双曲线,2a取负值。曲线在焦点处的宽度是一正值之量,称为正焦弦(通径)以2p表示。除了抛物线之外,所有的圆锥曲线均有偏心率额e,𝑒=𝑐𝑎𝑝=𝑎(1−𝑒2)圆和椭圆轨道:aO,e1双曲线轨道:aO,e1抛物线轨道:a=,e=1椭圆轨道:(椭圆的短半轴记作b),双曲线轨道:,抛物线轨道:c=∞,h单独决定了p,而E单独决定了a,它们共同决定了e,即确定了圆锥曲线轨道的具体形状。2.5利用牛顿定律证明开普勒第三定律。有牛顿万有引力定理得有圆周运动公式得:=由两式相等得:=K(常数)2.6计算第一宇宙速度和第二宇宙速度。航天器在圆周轨道上运行所必须具备的速度叫做圆周速度。GMm/R^2=mv^2/R,解得v=(GM/R)^0.5地球半径R=6371.02km,计算得第一宇宙速度为7.9km/s.同理设逃逸速度为,由机械能守恒,E===0得到逃逸速度为由动能定理得1/2*mV^2-GMm/r=0;解得V=√(2GM/r)这个值正好是第一宇宙速度的√2倍。计算得第二宇宙速度为11.2km/s.2.8什么是轨道六要素,它们是如何确定航天器在空间的位置的?航天器运行轨道的形状和其在间的位置,可以通过6个参量来表示,简称轨道要素或轨道根数。这些参量是相互独立的,而且通常具有十分明确的物理意义。轨道六要素是描述和确定222abc2(1)pae2(1)pae2gGMmrrrF2gGMmrrrF航天器轨道特征的量轨道六要素为:(1)轨道倾角i:航天器运行轨道所在的面叫轨道面,这个平面通过地心,它与地球赤道平面的夹角称为轨道倾角。(2)升交点赤径Ω:从春分点方向轴量起的升交点的经度,顺地球自转方向为正。0≤Ω≤2。(3)近地点角距ω:投影在天球上的椭圆轨道近地点与升交点对地心所张的角度,从升交点顺航天器运行方向量到近地点。(4)椭圆轨道的长半轴a。(5)椭圆偏心率𝑒=√𝑎2−𝑏2/𝑎,其中b是椭圆的短半轴。(6)航天器过近地点的时刻𝑡𝑝。确定航天器在空间的位置:(1)确定航天器轨道平面在空间的方位:由轨道倾角i和升交点赤经Ω确定。当轨道倾角i=0°时,称为赤道轨道;当i=90°时,称为极轨道;当0°i90°时,航天器运行方向与地球自转方向相同,称为顺行轨道;当90°i180°时,航天器运行方向与地球自转方向相反,称为逆行轨道;当i=180°时,航天器成为与地球自转方向相反的赤道航天器。(2)确定椭圆长轴在轨道平面上的指向:由近地点角距确定。(3)确定椭圆轨道的形状和大小:由长半轴a和偏心率e确定。(4)确定航天器在轨道上的位置:由航天器过近地点时刻把时间和空间(航天器在轨道上的位置)联系起来。3.1分析描述航天器姿态运动常用的参考坐标系之间的相对关系。答:航天器姿态运动常用的坐标系,主要有4种,分别是:惯性坐标系、质心平动坐标系、质心轨道坐标系、以及本体坐标系。在坐标系确定以后,航天器上任何一点的位置就可以在固联于星体的本体坐标中表示;若要描述三轴稳定航天器的对地定向运动,则要借助于质心轨道坐标系,若要讨论自旋卫星的章动运动时,就必须运用质心平动坐标系。而各种坐标系之间的关系可以通过一系列旋转角来表示,这些旋转角称为欧拉角。具体地说可以通过3个欧拉角,,来确定本体坐标系相对于其他坐标系的位置。以坐标系和为例,星体轴的位置可通过3次旋转达到坐标轴的位置。3.4若航天器本体坐标系Oxyz各轴不是主惯量轴,试推导姿态欧拉动力学方程。设航天器在空间以角速度旋转,其动量矩为。为了方便起见,基准点选航天器本体坐标系的原点,也即航天器质心0,是作用在航天器相对于质心0的合外力矩,所以航天器的动量矩即为式中,矢量r是刚体内相对于质心的矢径;是质量元在空间相对于质心的速度矢量;m为航天器的总质量。于是在本体坐标系中,刚体的和M可以分别表示成式中,是航天器本体坐标系各轴的单位矢量,上两式右端的系数则是相应矢量沿各坐标轴的分量。将H对时间t求取导数,求动量矩H在空间的变化率,即由于刚体在空间中以的角速度进行旋转,所以与其固连的本体坐标系各轴方向也在相应变化。已知坐标轴单位矢量的导数公式是代入H的导数式中,并根据动量矩定理得因,所以M在航天器本体坐标系中可以展开为其在各轴的分量表示为或表示成矩阵矢量形式,即上式称为欧拉力矩方程式。同理,对r求导也可得若刚体内各质点相对于质心的位置不变,式H描述的动量矩即为利用矢量叉乘公式,有代入H中,有:即:式中,I为惯性矩阵;分别为刚体绕坐标轴的转动惯量;称为惯量积。惯量积的数值可正可负,它们与坐标系的选取密切有关。如果在某一坐标系中,,则该坐标系称为主轴坐标系,轴就是刚体的主惯量轴。若轴不是刚体的主惯量轴,则直接将代入到中就得到此时的姿态动力学方程。3.5设有两颗转动惯量Ix,Iy,Iz完全相同的沿圆轨道运行的地球卫星,一颗轨道高度为2000km,另一颗为200km。试定量分析这两颗卫星各通道间耦合的强弱,并阐述产生耦合的原因。因为沿圆轨道飞行的角速度为:a=F/m=(GMm/r^2)/m=v^2/r∵F=mv^2/rv=sqrt(fr/m)=sqrt(GM/r)ω=2π/T=v/r其中是加速度,r是轨道半径,M是地球质量,m是卫星质量,G是常数,ω是角速度,T是周期。即,轨道高度为2000km的卫星对应的角速度为:ω=v/2000轨道高度为200km的卫星对应的角速度为:ω=v/200又因为航天器的线性化姿态动力学方程是:所以航天器姿态动力学在俯仰轴可以独立出来,而滚动和偏航姿态是相互耦合的。当这两颗卫星的各惯量相同时,由于轨道高度为2000km的比200km的角速度小,故其滚动和偏航姿态间的相互耦合强于轨道高度为200km的卫星。卫星做的是复合运动,其各旋转轴的角速度是相互耦合的,因而导致各通道间的耦合。3.6根据图3.8所示,分析比较轨道高度分别为200,500,1000,2000km的圆轨道卫星所受的最主要的两种干扰力矩的异同。答:200km和500km所受的最主要的两种干扰力矩是:气动力矩和重力梯度力矩;1000km和2000km所受的最主要的两种干扰力矩是:重力梯度力矩和磁力矩。4.5比较各种常用姿态敏感器的优缺点敏感器类型优点缺点地球敏感器(地平仪)1.适用于近地轨道卫星2.信号强3.轮廓清楚4.分析方便1.一般需要扫描机构2.需要防止太阳干扰3.精度约0.1°4.受轨道影响大太阳敏感器1.信号源强2.轮廓清楚3.功耗低、质量轻1.有阴影区2.精度约1′星敏感器1.精度约0.003°2.视场不受限制3.不受轨道限制1.信号弱2.结构复杂、成本高3.要防止太阳干扰4.星识别复杂5.确定初始姿态,需要第二个姿态确定系统磁强计1.成本低、功耗低2.对低轨道卫星灵敏度高1.分辨率大于0.5°2.受轨道影响大3.在星体内要进行磁清洁惯性敏感器1.自主性强2.不受轨道影响3.有限时间内精度高4.在星体上容易实现1.易于漂移2.有高速旋转部件,易磨损3.功率大、质量大射频敏感器1.精度约0.03°2.不受航天器形变弯曲影响3.结构以实现1.无自主性2.受地面站分布影响4.6航天器用的推力器应具备什么特点?为什么认为电推力器是最有发展前景的推力器?推力器是目前航天器控制使用最广泛的执行机构之一。它根据牛顿第二定律,利用质射排出,产生反作用推力,这也正是这种装置被称为推力器或喷气执行机构的原因。当推安装使得推力方向通过航天器质心,则成为轨道控制执行机构;而当推力方向不过质心,则必然产生相对航天器质心的力矩,成为姿态控制执行机构。根据产生推力所需能源的行驶不同,质量排出型推力器
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码





 海阔清风~
海阔清风~
本文标题:航天器制导与控制课后题答案(西电)
链接地址:https://www.777doc.com/doc-2052620 .html