您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 机械/模具设计 > 第三章控制系统的时间响应分析.
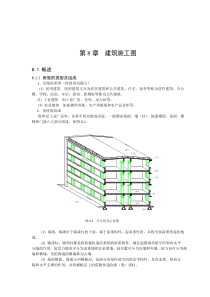
SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析第三章控制系统的时域分析同济大学汽车学院控制工程基础SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析3-1时间响应及系统性能指标3-2一阶系统的时间响应3-3二阶系统的时间响应3-4高阶系统的时间响应3-5稳定性及代数稳定判据3-6误差分析与计算本章主要内容SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析3-1时间响应及系统性能指标(1)时间响应概念(2)典型实验信号(3)瞬态响应指标SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析4()5()6()6,(0)2,(0)2ytytytyy其中,用拉普拉斯变换求解常系数微分方程2()(0)(0)5()5(0)6()6/sYssyysYsyYss2()(0)(0)5()5(0)6()6/sYssyysYsyYss2(0)(0)5(0)6()(2)(3)(2)(3)sysyyYsssssss零输入响应零状态响应23()154ttytee1.对微分方程进行拉氏变换,得到代数方程2.求解代数方程再反拉氏变换得到时域解。一、时间响应概念SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析若将系统的输出相应记为,则典型初始状态可表述为:()ct...()(0)(0)0ccc-0典型初始状态在外作用加于系统的瞬时之前,系统是相对静止的,被控量及其各阶导数相对于平衡工作点的增量为零。(0)t 规定控制系统的典型初始状态均为零状态。0t 时SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析具体来说就是利用系统的微分方程或传递函数作为工具,在输入信号作用下,在时域内求解运动方程,以获得系统的响应,从而对系统进行性能分析。一个稳定的控制系统,对输入信号的时间响应由两部分组成:瞬态响应和稳态响应。时域分析法:时间响应:动态系统相应于输入的输出。就是在时间域内对系统进行分析。SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析图3-1单位阶跃信号作用下的时间响应0t11tt()ct()ct瞬态响应稳态响应当时间趋于无穷大时,c(t)收敛于某一稳态值,则系统稳定,否则系统不稳定;瞬态响应反映了系统的动态特性,稳态响应反映了系统的精确程度。SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析(3)典型性,能反映大部分实际情况(工况)。在控制工程中常用的输入信号有以下几种:典型信号的选择,应满足以下条件:(1)数学表达式简单,易于分析处理;(2)能使系统在最不利的工况下工作;1、阶跃信号2、斜坡信号(速度信号)3、抛物线信号(加速度信号)4、脉冲信号(冲激信号)5、正弦信号(用于频域分析)二、典型实验信号SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析1、阶跃信号000ttAtr)((3-1)图3-2阶跃信号()rtA0tSchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析2、斜坡信号(速度信号)000ttAttr)((3-2)At()rtt0图3-3斜坡信号SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析3、等加速度信号(抛物线信号)000)(ttAttr221(3-3)()rt0t22At图3-4等加速度信号(抛物线信号)SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析4、脉冲信号(冲激信号)工程定义:1()trttt000,(3-4)图3-5脉冲信号t()rt01(a))(t0()rtt(b)SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析1300()0()()1tttrttdt()()(0)tftdtf定义1:定义2:单位脉冲函数(狄拉克函数)抽象定义如下:SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析1.延迟时间td:响应曲线第一次达到其终值一半所需时间。2.上升时间tr:响应从终值10%上升到终值90%所需时间;对有振荡系统亦可定义为响应从零第一次上升到终值所需时间。上升时间是响应速度的度量。3.峰值时间tp:响应超过其终值到达第一个峰值所需时间。4.调节时间ts:响应到达并保持在终值内所需时间。ptr0.5y(t)tdtp01tst稳态误差图3-7表示性能指标的阶跃响应曲线三、瞬态响应指标瞬态响应区域通常取=2%或5%SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析ptr0.5h(t)tdtp01tst稳态误差图3-7表示性能指标的阶跃响应曲线5.超调量%:响应的最大偏离量h(tp)与终值h(∞)之差的百分比,即()()%100%()phthh华北科技学院通常取=2%或5%SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析3-2一阶系统的时间响应SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析一、一阶系统的数学模型()()()ccrdutRCututdt()11()11crUsUsRCsTsRi(t)C)(tur)(tucR(s)C(s)E(s)-1/Ts•传递函数:•结构图:•微分方程:控制系统的运动方程为一阶微分方程,称为一阶系统。如RC电路:该系统称为一阶系统,其特点是系统最高阶导数只有一阶。C(s)R(s)1/(Ts+1)SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析二、一阶系统的单位阶跃响应输入r(t)=1(t),输出j0P=-1/TS平面(a)零极点分布y(t)0.6320.8650.950.982初始斜率为1/Th(t)=1-e-t/T0tT2T3T4T1(b)单位阶跃响应曲线1()1(0)tTytetSchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析19特点:1)可以用时间常数去度量系统的输出量的数值;2)初始斜率为1/T;3)无超调、稳态误差ess=0。性能指标:延迟时间:td=0.69T上升时间:tr=2.20T调节时间:ts=3T(△=5%)或ts=4T(△=2%)SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析三、一阶系统的单位脉冲响应输入r(t)=(t),输出11()(0)tTgtetTt0.135/T0.018/TT2T3T4T初始斜率为0.368/T0.05/T01t/Tg(t)eTT1g(t)(c)单位脉冲响应曲线21T特点:1)可以用时间常数去度量系统的输出量的数值;2)初始斜率为-1/T2;3)无超调;稳态误差ess=0。SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析四、一阶系统的单位斜坡响应跟踪误差:e(t)=r(t)-c(t)=Tt-T2(1-e-t/T)随时间推移而增长,直至无穷。因此一阶系统不能跟踪加速度函数。输入r(t)=t,输出一阶系统的单位斜坡响应是一条由零开始逐渐变为等速变化的曲线。稳态输出与输入同斜率,但滞后一个时间常数T,即存在跟踪误差,其数值与时间T相等。稳态误差ess=T,初始斜率=0,稳态输出斜率=1.1()(0)tTcttTTet21()2rtt输入22/1()(1)2tTcttTtTe输出五、一阶系统的单位加速度响应SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析结论1.一阶系统的典型响应与时间常数T密切相关。只要时间常数T小,单位阶跃响应调节时间小,单位斜坡响应稳态值滞后时间也小。但一阶系统不能跟踪加速度函数。SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析结论2.线性系统对输入信号导数的响应,等于系统对输入信号响应的导数,积分也如此。输入r(t)输出y(t)(t)1(t)t11(0)tTet11(0)tTetT1(0)tTtTTetSchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析例3.1某一阶系统如图,(1)求调节时间ts(△=5%);(2)若要求ts=0.1s,求反馈系数Kh。解:(1)与标准形式对比得:T=1/10=0.1,ts=3T=0.3s()100/10010()1()()1(100/)0.1101/10GsssGsHssss•(2)•要求ts=0.1s,即3T=0.1s,即,得1/100/()1100/1/100hhhKssKssK10.11003hK0.3hKKh=0.1C(s)R(s)E(s)100/s-SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析3-3二阶系统的时间响应SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析一、二阶系统的数学模型•传递函数22()()()()dxtdxtmfkxtFtdtdt2221()2nnnGskss微分方程:标准形式控制系统的运动方程为二阶微分方程,称为二阶系统。21()Gsmsfsk222()2nnnGsss其中,,为系统增益1,2nkfmkmkSchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析故得结构图其中:ωn—自然频率;ζ—阻尼比。2222121()()()2()()nnnnCsGsRsssssssss输出的拉氏变换为二、二阶系统的阶跃响应Y(s)R(s)2222nnnssSchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析2221,2201nnnnsss方程的根决定了系统的响应形式。(a)闭环极点分布j1122334505(b)单位阶跃响应曲线1.21.01.61.40.80.60.40.2c(t)161824681012140t21354•描述如下:二阶系统特征方程及特征根SchoolofAutomotivestudy同济大学汽车学院控制工程基础第三章控制系统的时间响应分析1.欠阻尼二阶系统(0<ζ<1)•稳态部分等于1,表明不存在稳态误差;瞬态部分是阻尼正弦振荡过程,阻尼的大小由n(即σ,特征根实部)决定•振荡角频率为阻尼振荡角频率d(特征根虚部),其值由阻尼比ζ和自然振荡角频率n决定。•系统有一对共轭复根:21,21nnsjdj=arccos2()1sin()(0)1ntdecttt=c
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码
![表面微生物检测方法[1]](/doc-298064.png)
 milkyway229
milkyway229
本文标题:第三章控制系统的时间响应分析.
链接地址:https://www.777doc.com/doc-2121271 .html