您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 质量控制/管理 > 帝人减速机RV中文版
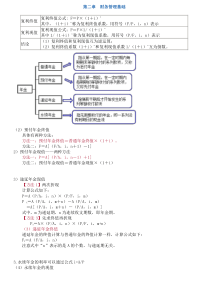
T.M.PRECISIONREACHESANEWLEVEL3452应用示例乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗3ReducerForHighPrecisionControlCONTENTS特点8构造和工作原理9旋转方向与速比乗乗乗乗乗乗10额定表乗乗乗乗乗乗乗乗乗乗乗11选定乗乗乗乗乗乗乗乗乗乗乗乗135-1选定流程图乗乗乗乗乗乗乗乗乗135-2强度与寿命乗乗乗乗乗乗乗乗乗155-2-1启动、停止时的允许转矩乗乗155-2-2瞬时最大允许转矩乗乗乗乗乗155-2-3额定寿命乗乗乗乗乗乗乗乗乗155-3主轴承的功率乗乗乗乗乗乗乗乗165-3-1力矩刚性乗乗乗乗乗乗乗乗乗165-3-2允许力矩乗乗乗乗乗乗乗乗乗165-3-3瞬时最大允许力矩乗乗乗乗乗17各性能乗乗乗乗乗乗乗乗乗乗乗186-1刚性(弹簧常数、空转)与齿隙186-1-1扭曲角的计算示例乗乗乗乗乗186-2振动乗乗乗乗乗乗乗乗乗乗乗乗196-3角度传递误差乗乗乗乗乗乗乗乗196-4无负载转动转矩乗乗乗乗乗乗乗206-5增速启动转矩乗乗乗乗乗乗乗乗206-6低温特性乗乗乗乗乗乗乗乗乗乗216-7功率表乗乗乗乗乗乗乗乗乗乗乗22设计方面的注意事项乗乗乗乗237-1装配精度乗乗乗乗乗乗乗乗乗乗237-2装配要领乗乗乗乗乗乗乗乗乗乗237-2-1输出轴螺栓紧固型乗乗乗乗乗237-2-2输出轴销并用紧固型乗乗乗乗247-3螺栓紧固转矩、允许传递转矩乗257-4安装输入齿轮乗乗乗乗乗乗乗乗267-4-1RV-6E、20E、40E 装配输入齿轮时的注意事项乗乗277-4-2能贯通减速机内的速比与不能 贯通的速比乗乗乗乗乗乗乗乗乗277-4-3不能贯通的速比的安装示例乗287-5润滑乗乗乗乗乗乗乗乗乗乗乗乗287-5-1润滑脂润滑乗乗乗乗乗乗乗乗287-6保修乗乗乗乗乗乗乗乗乗乗乗乗30外形寸法図乗乗乗乗乗乗乗乗乗31特点乗乗乗乗乗乗乗乗乗乗乗乗54构造和工作原理乗乗乗乗乗乗55旋转方向与速比乗乗乗乗乗乗56额定表乗乗乗乗乗乗乗乗乗乗乗57选定乗乗乗乗乗乗乗乗乗乗乗乗595-1选定流程图乗乗乗乗乗乗乗乗乗595-2强度与寿命乗乗乗乗乗乗乗乗乗615-2-1启动、停止时的允许转矩乗乗615-2-2瞬时最大允许转矩乗乗乗乗乗615-2-3额定寿命乗乗乗乗乗乗乗乗乗615-3主轴承的功率乗乗乗乗乗乗乗乗625-3-1力矩刚性乗乗乗乗乗乗乗乗乗625-3-2允许力矩乗乗乗乗乗乗乗乗乗625-3-3瞬时最大允许力矩乗乗乗乗乗63各性能乗乗乗乗乗乗乗乗乗乗乗646-1刚性(弹簧常数、空转)与齿隙646-1-1扭曲角的计算示例乗乗乗乗乗646-2振动乗乗乗乗乗乗乗乗乗乗乗乗656-3角度传递误差乗乗乗乗乗乗乗乗656-4无负载转动转矩乗乗乗乗乗乗乗666-5增速启动转矩乗乗乗乗乗乗乗乗666-6低温特性乗乗乗乗乗乗乗乗乗乗676-7功率表乗乗乗乗乗乗乗乗乗乗乗68设计方面的注意事项乗乗乗乗697-1装配精度乗乗乗乗乗乗乗乗乗乗697-1-1RV-10C~500C的装配精度乗697-2减速机装配要领乗乗乗乗乗乗乗707-2-1低速管装配示例乗乗乗乗乗乗707-2-2输出轴螺栓紧固型的 装配示例(RV-10C~500C)乗707-2-3输出轴通孔螺栓紧固型的装配示例 (RV-27C、50C、100C、200C)乗717-2-4输出轴通孔螺栓紧固型的 装配示例(RV-10C、320C)乗乗717-3中心齿轮、输入齿轮乗乗乗乗乗727-3-1中心齿轮与输入齿轮的精度乗727-3-2标准中心齿轮乗乗乗乗乗乗乗727-4螺栓紧固转矩、允许传递转矩乗737-5安装输入齿轮乗乗乗乗乗乗乗乗747-6润滑乗乗乗乗乗乗乗乗乗乗乗乗747-7保修乗乗乗乗乗乗乗乗乗乗乗乗76外形尺寸图乗乗乗乗乗乗乗乗乗77构造乗乗乗乗乗乗乗乗乗乗乗乗91旋转方向与速比乗乗乗乗乗乗92额定表乗乗乗乗乗乗乗乗乗乗乗93选定乗乗乗乗乗乗乗乗乗乗乗乗954-1选定流程图乗乗乗乗乗乗乗乗乗954-2强度与寿命乗乗乗乗乗乗乗乗乗974-2-1启动、停止时的允许转矩乗乗974-2-2瞬时最大允许转矩乗乗乗乗乗974-2-3额定寿命乗乗乗乗乗乗乗乗乗97各性能乗乗乗乗乗乗乗乗乗乗乗985-1刚性(弹簧常数、空转)与齿隙985-1-1扭曲角的计算示例乗乗乗乗乗985-2振动乗乗乗乗乗乗乗乗乗乗乗乗995-3角度传递误差乗乗乗乗乗乗乗乗995-4无负载转动转矩乗乗乗乗乗乗1005-5增速启动转矩乗乗乗乗乗乗乗1005-6低温特性乗乗乗乗乗乗乗乗乗1015-7功率表乗乗乗乗乗乗乗乗乗乗102设计方面的注意事项乗乗乗1036-1装配精度乗乗乗乗乗乗乗乗乗1036-2安装示例乗乗乗乗乗乗乗乗乗1046-2-1RV减速机的安装孔形状乗乗1046-2-2RV减速机的嵌合乗乗乗乗乗1046-3装配要领乗乗乗乗乗乗乗乗乗105RV-15、30装配示例乗乗乗乗105RV-60~RV-550装配示例乗乗1076-4螺栓紧固转矩、允许传递转矩1096-5安装输入齿轮乗乗乗乗乗乗乗1106-5-1装配RV15、30输入齿轮时的 注意事项乗乗乗乗乗乗乗乗乗1106-5-2能贯通减速机内的速比与 不能贯通的速比乗乗乗乗乗乗1116-5-3不能贯通的速比的安装乗乗1116-6润滑乗乗乗乗乗乗乗乗乗乗乗1116-6-1润滑脂润滑乗乗乗乗乗乗乗1116-7保修乗乗乗乗乗乗乗乗乗乗乗112外形尺寸图乗乗乗乗乗乗乗乗11312345678123456781234567RV-E系列RV-E系列RV-E系列RV-E系列RV-C系列RV系列1型号表示乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗乗116卷尾订购减速机时的确认事项润滑脂'MolywhiteRENo.00'的简介MolywhiteRENo.00的订单精密控制用高刚性减速机技术资料集1型号表示1■RV-E系列●订购、咨询时,请按下述型号标记进行指示。■RV-C系列●订购、咨询时,请按下述型号标记进行指示。RV80E121AB型号名称框编号名称特殊构造输出轴螺栓紧固型输出轴销并用紧固型B●●P主轴承内置型E输入齿轮输入花键形状速比值(减速比=1—R)标准尺寸产品(细轴型)A标准尺寸产品(粗轴型)B特殊(无)Z例.RV-80E的情况注)1.其他类型请参照额定表。2.请按轴转动的速比值进行指示。RV100C36.75AB型号名称框编号名称特殊构造输出轴螺栓紧固型输出轴通孔螺栓紧固型B●●T中空型C中央齿轮形状速比值(减速比=1—R)标准尺寸产品A无Z注)1.表记的36.75是在RV-100C的情况下。2.其他框编号的速比值请参照额定表。3.请按轴转动的速比值进行指示。620408011016032045010275010020032050010(98)27(265)50(490)100(980)200(1,961)320(3,136)500(4,900)6(58)17(167)42(412)80(784)110(1,078)160(1,568)320(3,136)450(4,410)框编号框编号额定输出转矩kgf-m(Nm)额定输出转矩kgf-m(Nm)R轴转动的情况57,81,101,121,1532■RV系列●订购、咨询时,请按下述型号标记进行指示。RV60121AT型号名称框编号名称特殊构造标准型无记号速比值(减速比=1—R)输入齿轮输入花键形状标准尺寸产品(细轴型)A标准尺寸产品(粗轴型)B特殊(无)Z例.RV-60的情况注)1.其他类型请参照额定表。2.请按轴转动的速比值进行指示。输出轴螺栓紧固型输出轴通孔螺栓紧固型B●●T15306016032045055014(137)34(333)65(637)160(1,568)320(3,136)450(4,410)550(5,390)框编号额定输出转矩kgf-m(Nm)R轴转动的情况57,81,101,121,1533应用示例2机械手旋转轴RV-C系列●实现了旋转轴节省空间的设计●机械手侧不需要主轴承机械臂RV-C系列●为了能在臂内部穿插电缆,提高了耐环境性●增大动作角度分度盘RV-C系列●可实现工作台的中空构造4机械臂RV-E系列机械手手腕轴RV-E系列如右图所示,能够在减速机内部保持输入齿轮。详情请咨询本公司。机械手旋转轴RV系列RV-E系列2级减速机构8RV-E系列特点1●安装有径向止推滚珠轴承,因此能够支撑外部负荷,力矩刚性、允许力矩大●可以减少所需的构成零部件的个数●安装方便主轴承内置机构●曲柄轴在减速机中由双柱支撑双柱支撑机构●使用滚动轴承滚转接触机构●RV齿轮和销的同时咬合数多销齿轮机构图1●RV齿轮的公转速度变慢,振动减小●能够减小电机直结部(输入齿轮)、惯性减小加强件贯通孔曲柄轴贯通孔RV齿轮加强件曲柄轴贯通孔轴+支撑法兰●振动小●GD2小●可靠性提高●总成本降低●扭转刚性大●振动小●耐冲击性强●启动功率优异●磨耗小、寿命长●齿隙小(1arc.min.)●齿隙小(1arc.min.)●耐冲击性强9构造和工作原理2■构造■工作原理图2RV-E型减速机是2级减速型。第1减速部…正齿轮减速机构●输入轴的旋转从输入齿轮传递到正齿轮,按齿数比进行减速。这是第1减速部。第2减速部…差动齿轮减速机构●正齿轮与曲柄轴相连接,变为第2减速部的输入。在曲柄轴的偏心部分,通过滚动轴承安装RV齿轮。另外,在外壳内侧仅比RV齿轮的齿数多1个的销,以同等齿距排列。如果固定外壳转动正齿轮,则RV齿轮由于曲柄轴的偏心运动也进行偏心运动。此时如果曲柄轴转动1周,则RV齿轮就会沿与曲柄轴相反的方向转动1个齿。这个转动被输出到第2减速部的轴。●将轴固定时,外壳侧成为输出侧。图3曲柄轴旋转角0°旋转角180°旋转角360°外壳曲柄轴(与正齿轮连接)轴RV齿轮销10RV-E系列旋转方向与速比3RV-E型减速机有很多使用方法。旋转方向与速比如下图所示。请选择昀佳使用方法。图4■速比第1减速部与第2减速部相加得到的减速比i因使用方法而异,可以根据下列公式所示的速比值算出。轴转动的情况 R=1+Z2——Z1•Z4i=1—R结构图图5减速装置①外壳固定轴输出的情况②轴固定外壳输出的情况③输入齿轮固定轴输出的情况输入:输入齿轮i=1—R输入:轴i=R输入:输入齿轮i=-1———R−1输入:外壳i=-(R−1)输入:外壳i=R-1———R输入:轴i=R———R-1增速装置④外壳固定输入齿轮输出的情况⑤轴固定输入齿轮输出的情况⑥输入齿轮固定外壳输出的情况●i表示各种情况下的输入相对应的输出速度比。速度比i的+表示输入与输出为相同方向;-则表示输入与输出为相反方向。R:速比值Z1:输入齿轮的齿数Z2:正齿轮的齿数Z3:RV齿轮的齿数Z4:销根数i:减速比11额定表4表1注)1.请将输入轴昀高转速设定为小于允许昀高输出转速×速比值。2.输入功率(kW),考虑了减速机的功率。3.输出转矩(Nm)是在各输出转速中将寿命时间设为固定得出的值。(N.T10—3=固定)4.额定转矩是指输出转速15r/min时的输出转矩。是计算寿命的基础数值。额定寿命请参照(15页)。但是,RV-6E输出转数30r/min时的输出转矩为额定转矩。5.惯性力矩值是考虑了减速机本体和输入齿轮的齿宽后的值。不包括输入齿轮轴部的惯性力矩。31304342101817266625854RV-6E53.552.5(10.3)(8.34)(7.39)(6.78)(6.34)(6.00)(5.50)595879780.070.110.150.190.220.250.3010310257568180231188167153143135124RV-20E105104(23.6)(19.2)(17.0)(15.6)(14.6)(13.8)(12.7)1211201411400.160.260.350.430.500.570.701
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 ljz1314
ljz1314
本文标题:帝人减速机RV中文版
链接地址:https://www.777doc.com/doc-2131737 .html