您好,欢迎访问三七文档
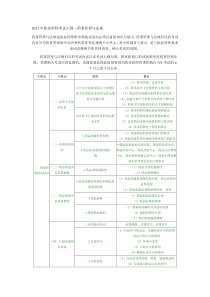
第四章-飞行控制飞行器飞行控制系统费为主要飞行控制和辅助飞行控制。主要飞行控制系统包含那些飞行中要求的安全控制飞机,这些包含副翼,升降舵或者安定面,以及方向舵。辅助控制系统提升了飞机的性能特性,或者减轻了飞行员的过多控制力。辅助控制系统的例子有机翼襟翼和配平系统。主要飞行控制飞机控制系统被细心的设计为提供自然的感觉,同时,对控制输入有足够的响应度。低速时,控制通常感觉是偏软且反应缓慢的,飞机对施加控制的反应是慢慢的。在高速飞行时,控制感是偏硬的,反应也更快。三个主要飞行控制面中任意一个的运动都会改变机翼上面和周围的气流以及压力分布。这些变化影响机翼和控制面结合而产生的升力和阻力,这样飞行员才能够操控飞机沿3个轴向的旋转。设计特征限制了飞行控制面的偏转程度。例如,控制停止机制可能会结合到飞行控制中,或者控制杆的运动和/或方向脚舵可能受限。这些设计限制的目的是防止在正常机动时飞行员无意中的操纵过量或者飞机的过载。良好设计的飞机应该是机动时稳定而容易控制的。控制面输入导致3个轴向旋转的运动。飞机表现出来的稳定性类型也和3个轴向的旋转有关。如图4-1。(注:飞机控制,运动,旋转轴向,和稳定性类型)副翼副翼控制纵轴方向的侧滚。副翼安装在每一个机翼的后缘外侧,且运动方向彼此相反。副翼通过线缆,双臂曲柄,滑轮或推挽式管互相链接,然后相连到控制轮。向右移动控制轮导致右侧副翼向上偏转,左侧副翼向下偏转。右侧副翼的向上偏转降低了机翼的拱形,使右侧机翼的升力降低。相应的左侧副翼的向下偏转增加了拱形幅度,使左侧机翼的升力增加。因此,左侧机翼的升力增加和右侧机翼的升力降低使飞机向右侧滚。逆偏转由于向下偏转的副翼产生更大的升力,它也会产生更大的阻力。这个增加的阻力试图使飞机头朝机翼上升的一侧偏转。这称为逆偏转。如图4-2。方向舵用来克服逆偏转,在低速,大迎角和大的副翼偏转角时所需要的方向舵控制程度最大。然而,在较低速度时,垂直安定面和方向舵组合变得低效,扩大了和逆偏转有关的控制问题。所有转弯都是通过使用副翼,方向舵和升降舵来协调的。为使飞机达到所需要的倾斜角度必须要对副翼施加压力,而同时要施加方向舵压力来克服产生的逆偏转。转弯期间,必须施加升降舵压力来增加迎角,因为转弯时所需要的升力比平直飞行时的升力大。转弯越急,升降舵就越需要往后压(即操纵杆往后拉)。当需要的倾斜角之后稳定后,应该释放副翼和方向舵的压力。这将停止倾斜度的增加,因为副翼和方向舵控制面将会在它们的位置上呈中性的流线型。升降舵压力需要保持恒定以维持恒定高度。转弯时的向外侧滑和向内侧滑是类似的,除非施加的飞行控制方向相反。副翼和方向舵的控制方向向外侧滑或者高机翼方向。当倾斜角增加时,为维持高度必须要释放升降舵的压力。差动副翼对于差动副翼,在控制轮的给定运动下,一只副翼的上升距离比另一只副翼的下降距离大。下降的机翼产生的阻力增加。产生较大阻力的下降机翼侧副翼的上偏转角度比上升机翼侧的副翼向下偏转的角度大。虽然逆偏转被减轻了,但是它不会立即消除。如图4-3弗利兹型副翼就弗利兹型副翼而言,当控制轮上施加压力后,被升起的副翼在一个偏置的铰链上旋转。这就把副翼的前缘突出到气流中,因此产生了阻力。这有助于使另一侧机翼上放下的副翼产生的阻力得到均衡,从而减轻逆偏转。如图4-4弗利兹型副翼也形成一个狭槽,因而气流平滑的通过放下的副翼,使得在大迎角时更有效。弗利兹型副翼也可能被设计成功能差动的。类似于差动副翼,弗利兹型副翼不能完全消除逆偏转。无论什么情况下使用了副翼都仍然需要协调运用方向舵。耦合式副翼和方向舵耦合副翼和方向舵的意思是这些控制被连接在一起。这是通过使用方向舵-副翼互连弹簧来完成的,它通过副翼偏转的同时自动地偏转方向舵来帮助纠正副翼阻力。例如,当移动操纵杆进行左侧滚时,互连的线缆和弹簧向前拉左侧的脚舵正好足够阻止飞机机头向右偏转。弹簧施加到方向舵上的力可以盈余,如果必须滑移飞机的话。如图4-5升降舵升降舵控制沿横轴的俯仰运动。类似小飞机上的副翼,升降舵通过一系列机械连杆机构连接到座舱中的控制杆。控制杆的向后移动使升降舵面的后缘向上偏转。这一般指上升降舵。如图4-6升降舵是改变飞机俯仰姿态的主要控制手段。上升降舵位置减弱了升降舵的拱形,产生了一个向下的空气动力,它比平直飞行时的正常尾部向下的力要大。总体效果是导致飞机的尾部向下移动,机头上仰。俯仰运动绕重心发生。俯仰运动的强度由重心和水平尾翼面的距离和水平尾部翼面上气动力有效性决定。向前移动控制杆有相反的效果。这种情况下,升降舵的拱形度增加,水平安定面或者安定面上产生的升力更多(尾部向下的力更小)。这就把尾部向上移动,使机头下俯。此外,俯仰运动还是绕飞机重心发生的。正如前面稳定性讨论中提到的,功率,推力线,和尾翼上水平尾翼面的位置都是影响升降舵控制俯仰有效性的因素。例如,水平尾翼面可能安装在开进垂直安定面的较低位置,在中点,或者在高点的位置,就像T型尾翼的设计。T型尾翼在T型尾翼结构中,正常飞行条件下,升降舵在螺旋桨带来的气流和机身以及以及气流大部分影响范围之上。升降舵在这种未受扰动气流中的操作使得大多数飞行状态下的控制运动是一致的。T型尾翼设计在很多轻型飞机和大飞机上变的流行了,特别是那些机身尾部安装引擎的飞机,因为T型尾翼结构使得尾部翼面远离发动机排出的气流。水上飞机和水陆两用飞机经常有T型尾翼结构,目的是让水平尾翼面尽可能远离水面。另一个额外的好处是降低了振动和飞机内部的噪声。低速飞行时,T型尾翼飞机的升降舵相比常规尾翼飞机的升降舵必须移动一个较大的角度来抬升机头到相同的角度。这是因为常规尾翼的飞机有来自螺旋桨的气流在尾翼上施加向下的力来辅助抬升机头。因为飞机的控制是这样的方式装备的,增加的控制行程要求控制力增加,抬升T型尾翼飞机的机头需要的力比抬升常规尾翼飞机机头需要的力大的多。两种类型尾翼的飞机平衡后的纵向稳定性是一样的,但是飞行员必须知道在起飞、着陆或者失速等低速飞行时,需要的控制力比同规格大小的常规尾翼飞机需要的力大的多。T型尾翼飞机也需要额外的设计考虑来克服颤动问题。因为水平翼面的重量在垂直尾翼的顶部,产生的力臂在垂直尾翼上有很高载荷,会导致颤动。工程师必须通过增加垂直尾翼的刚度来补偿这个载荷,通常相比常规尾翼设计这带来了重量代价。当以低速飞行在很高迎角,且重心偏后,T型尾翼飞机会容易发生深度失速。在深度失速状态,水平尾翼上的气流被来自机翼和机身的扰动气流覆盖。这种条件下,升降舵和全动水平尾翼控制会被削弱,使得难以从失速改出。应该注意到偏后的重心是这些意外事件的促进因素,因为重心偏后的常规尾翼飞机也会发现类似的改出问题。如图4-7。因为高迎角低速和重心偏后的飞行可能危险,很多飞机有补偿这种状态的系统。这些系统从控停(controlstop)到升降舵下拉弹簧。升降舵下拉弹簧帮助降低机头来比啊免由于重心偏后引起的失速。失速发生因为适当平衡的飞机其后缘的升降舵位于向下位置,迫使尾部抬升和机头下降。在这种不稳定状态,如果飞机遭遇紊流和速度进一步降低,配平片不能再使升降舵置于机头下降的位置。升降舵然后呈流线型,飞机机头开始向上仰。这就使情况恶化,可能导致一次失速。升降舵下拉弹簧在升降舵上产生一个机械载荷,如果没有平衡的话会使它朝机头下降的位置移动。升降舵配平片平衡升降舵下拉弹簧,以设定升降舵位于配平平衡位置。当配平片开始失灵时,下拉弹簧驱动升降舵到机头下降位置。飞机机头降低,速度增加,失速就会避免。如图4-8。在着陆拉平期间,升降舵也必须有足够的力量来保持机头抬起。既然这样,靠前的重心就会导致一个问题。在着陆拉平时,功率通常是降低了,这也使尾翼上的气流减弱。这和降低的着陆速度一起使得升降舵的有效性变差。根据这些讨论,很明显飞行员必须理解和遵守适当的装载程序,特别要注意重心的位置。有关飞机载荷的更多信息以及重量和平衡在第八章讨论。全动式水平尾翼正如第一章提到的,全动式水平尾翼本质上是一片带有相同类型控制系统的水平安定面。因为全动式水平尾翼绕中心铰链点做回转运动,它们对控制输入和空气动力负载相当敏感。反作用伺服调整片(antiservotab)安装在它的后缘以降低灵敏度。另外,在主翼梁的前面还有配有配重装置。配重可以设计到尾部或安装到全动式尾翼片的前部。如图4-9当控制杆后拉时,它抬升了全动式水平尾翼面的后缘,使飞机旋转机头抬升。向前推控制杆,使水平尾翼的后缘放低,机头向下俯。如果没有抗随动片的话,飞机会由于飞行员的控制而倾向于舵面偏转过量。鸭式机翼术语鸭式机翼是指作为水平安定面的控制面却位于主机翼的前面。这个术语也被用来形容装配了鸭式机翼的飞机。从效果上讲,它是一种类似于常规后尾设计水平控制面的翼型。区别是实际上鸭式机翼产生升力,保持机头抬升,和后尾设计相反,后尾设计会在尾部施加向下的力来防止机头向下偏。如图4-10.尽管莱特飞机有水平控制面在升力翼前面的鸭式机翼配置,直到最近鸭式配置才开始出现在较新的飞机上。鸭式设计包括两种类型:一种是水平控制面和正常的后尾设计有大约相同的尺寸,另外一种是差不多相同大小的控制面,但是翼型是被称为串联翼配置(tandemwingconfiguration)的后安装式机翼。理论上认为鸭式机翼更有效率,因为利用水平控制面来帮助抬升飞机的重量对于一定大小的升力来说应该导致阻力更少。鸭式机翼的主要优势是在失速特性方面。适当设计的鸭式机翼或者串联翼将会在主机翼将要失速前的一个时刻失去进一步抬升机头的能力。这就使飞机具备抗失速能力,结果是可以通过增加马力来阻止飞机的速度。主机翼上的副翼在整个失速改出过程中仍然起作用。其他的鸭式结构也被设计出来,所以鸭翼比主机翼提前失速,能够自动的降低机头,改出飞机到一个安全的飞行速度。而且,副翼在失速中保持有效。鸭式设计有几个限制。首先,鸭式设计的前部升力面比主翼提前失速是很重要的。如果主翼先失速,来自前面机翼或鸭式机翼的残余升力明显的在重心之前,飞机将不可控制的上仰。其次,当前部升力面先失速,或者鸭翼增加迎角的能力受限时,主翼将永远不能产生最大的升力,会浪费一些性能。第三,对于前部机翼或者鸭翼,主翼上襟翼的使用带来设计问题。当主翼通过伸出襟翼来增加升力时,鸭翼所需要的升力也增加。前向翼或者鸭翼必须足够的大才能适应襟翼的应用,但是又不能产生过大而产生比主翼多的升力。最后,主翼和前部控制面的关系也不同了。当靠近垂直平面的状态时,来自前部机翼的下洗流会对主翼的升力有负作用。增加的垂直分量增加了设计效率。当两个控制面的大小增加到接近相等时,效率也会增加。方向舵方向舵控制飞机沿垂直轴的运动。这个运动称为偏航。和其他主要控制面类似,方向舵也是一个铰链到固定面的可运动面,在这里它是铰链到垂直安定面上。左右方向舵踏板的运动控制方向舵。当方向舵偏转到气流中时,会在相反的方向上施加水平方向的力。如图4-11通过踩踏左踏板,方向舵向左移动。这就改变了垂直安定面/方向舵周围的气流,产生一个侧向里,把尾部向右移动,使得飞机头向左偏航。方向舵有效性随速度而增加,因此在低速飞行时的大角度偏转和高速飞行时的小角度偏转能够提供需要的反作用力。对于螺旋桨驱动的飞机,流过方向舵的任何滑流都会增加它的有效性。V型尾翼V型尾翼使用两个倾斜的尾部翼面来完成和常规升降舵及方向舵结构控制面相同的功能。固定的翼面既作为水平安定面也作为垂直安定面。如图4-12可动的控制面通常称为“方向升降舵”,它们使用特殊铰链连接,使得控制轮能够同时移动两个控制面。另一方面,方向脚踏的移位能够方向相反的移动控制面,所以就提供了方向控制。当飞行员移动方向舵和升降舵控制时,一个控制混合机构会移动每个控制面适当的大小。V型尾翼的控制系统比常规尾翼需要的要复杂的多。另外,V尾设计对荷兰轨滚趋势比常规尾翼更加敏感,唯一最小的是阻力的总减少量。辅助飞行控制辅助飞行控制系统由可包括襟翼,前缘装置,扰流板和配平(trim)装置。襟翼襟翼是几乎所有飞机都使用的最常见高升力装置。对任何设定的迎角,这些安装在机翼后缘的控制面既增加了升力又增加了诱导阻力。襟翼容许
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 guotaopkpk
guotaopkpk
本文标题:第四章飞行控制
链接地址:https://www.777doc.com/doc-2171741 .html