您好,欢迎访问三七文档
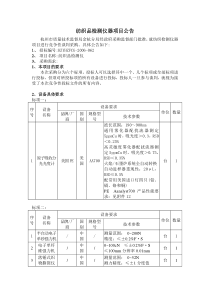
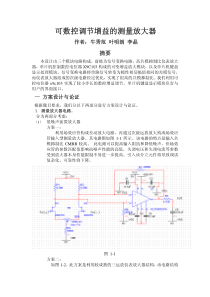
力传感器动态标定系统张乾斌21115020321前言在航空航天、车辆、舰船、兵器、机器人、材料试验等诸多领域,力电测系统(即以计算机—力传感器为平台的力测量系统)已被广泛使用。力电测系统主要用以担负动态力的测量任务,尤其是拉压双向动态力。人们对力值计量在相当长的一段时间里仅局限于静态力值的计量。随着近代高精度测试仪器的发展,力值静态计量的手段与方法己日趋完善,计量精度也在不断提高,而对于动态力值则往往是以静标动的方法进行,即仅依据计量器具静态校准时的数据结果作为动态测试时的依据。其结果是,在静态校准中精度很高的测试装置,在动态测试中却可能出现极大的误差,致使整个测试装置在动态情形下失去其可信性,且极易造成人们的错误判断。随着科学的发展和技术的进步,人们涉足的领域越来越广,对计量测试技术也不断提出新的要求。静态标定技术既然已经不能完全满足工程应用的要求,动态力值计量问题便越来越引起人们的重视。力传感器动态标定要求有精确的动态力发生装置。但是迄今为止,国内外均没有技术成熟、性能可靠和实用的动态标定装置。全国计量系统均无力传感器动态校准能力,除航天、军工等少数部门建立了一定的动态标定装置以外,民用工业领域仍然普遍采用“静标动用”的方法。因此对力传感器动态标定的研究意义重大。从国内外相关研究情况看,力传感器动态标定主要采用瞬变力源和正弦力源两类激励方法,其中正弦力源激励式易于控制,精度及可靠性较高。我导师在长期研究正弦激振技术及其工业应用的过程中,发明了一种新型正弦激励装置,其相关成果已在汽车工业领域推广应用。以此为基础,提出一种新型的正弦力加载式力传感器动态标定方法,设计相应装置,搭建标定系统,并进行实验,有望为我国相关领域和计量部门提供一种先进、实用的动态标定技术方案。这个课题也是我接下来要跟着做的,我们需要在一年左右将整个系统组装好后将控制程序编写出来,在用这套系统对立传感器进行动态标定。2原理介绍2.1正弦力加载装置原理本课题提出的正弦力惯性加载式力传感器动态标定原理如图所示。工控机控制变频器电机以一定频率运转,推动正弦机构工作,正弦机构主滑块台面上刚性连接着待标力传感器,力传感器上刚性连接着负载质量块。同时,正弦机构主滑块上还装有位移传感器以测量其产生正弦波的位移。力传感器和位移传感器的输出信号通过信号调理器放大、隔离后被数据采集卡采集并保存在工控机中。经数据处理程序处理后便可得到力传感器输出电压和力传感器理论受力。两者之比便为力传感器的动态灵敏度即其稳态下的幅频特性。通过改变负载质量块的质量、正弦机构的行程和变频器的输出频率即可实现可变力值、频率的力传感器动态标定。在机械原理教科书中,正弦机构由做相互垂直运动的两个滑块和一个曲柄组成,如图所示。图中主滑块受导轨约束仅可做垂直往复运动,副滑块受曲柄〗和主滑块上的横向导轨约束,在绕铰链转动的同时还相对于主滑块做左右往复运动。当曲柄在电机带动下做匀速运动时,主滑块便在副滑块的带动下做正弦规律的往复运动。图右图为在中建立的简单运动学模型,通过运动学分析可以得到:式中s为主滑块位移,a为主滑块加速度,r为曲柄半径,为曲柄角速度,为初始转角。从式和中可以得出在正弦机构中,主滑块的位移和加速度有以下关系:本标定系统采用位移传感器测量主滑块位移,经数据处理后即可得到其加速度,而不是直接采用加速度传感器进行直接测量。其原因是,使用位移传感器可溯源至长度和时间,且位移传感器的精度非常高,可以达到微米级甚至纳米级;而相较之下加速度传感器的溯源性和精度则都略差一点。图为标定系统连接模型力传感器的基部和末端分别与正弦机构主滑块和负载质量块固连,如果力传感器为刚体,则力传感器受力可以简单表示为:然而实际上虽然力传感器刚度很大但其并非完全刚性标定时由于力传感器末端与负载质量块固连会造成力传感器末端质量的相对运动从而引入附加质量力传感器实际受力应表示为:相关研究表明附加质量与力传感器的特性有关,且会随着频率变化而变化,为了去除附加质量对标定结果的影响,采用差值处理,即在一次定频标定时,分别釆用两块质量不同的附加质量块和,进行两次实验。可得:式中分别是两次实验力传感器的输出电压,bass,分别是两次实验主滑块的位移。bamm,分别是两次实验负载质量块的质量。这里,bauu,均为有零点偏移的正弦函数,可分解为两部分,一个是不随时间变化的直流信号,由负载质量的重力和传感器自身零漂产生引起;另一个是标准正弦函数,由质量块的正弦运动产生。本次标定主要关注力传感器对于正弦激励的稳态输出,故式可进步表示为:式中baUU,分别是两次实验力传感器输出正弦电压的幅值,baSS,是两次实验正弦位移的幅值,其数值等于曲柄半径。由于两次实验时曲柄半径和运行频率均未改变,故:式中,sbsaUU,是两次实验位移传感器输出正弦电压的幅值;sS为位移传感器灵敏度,由厂家给出。两者相减并化简后可得力传感器动态灵敏度的计算式:利用数据采集程序通过数据采集卡釆集力传感器输出电压和位移传感器输出电压,再经数据处理程序分别求取其幅值,再经一定处理便可得到力传感器的的动态灵敏度即其稳态下的幅频特性。通过该方法来求取力传感器动态灵敏度,避免了附加质量的干扰,精度较直接求取有一定提高。从上式可以看出正弦力的幅值取决于质量块质量、曲柄半径和曲柄转速,频率取决于曲柄转速。在标定时可通过更换质量块或使用调整螺母改变曲柄半径来实现可变动态力幅值的定频标定,通过改变电机转速可以实现频率可变的扫频标定。2.2数据采集正弦力惯性加载式力传感器动态标定系统主要由正弦力发生装置、待标定力传感器、信号调理器、数据采集卡、工控机以及数据采集、处理程序等几个部分组成。标定系统又可根据功能分为数据采集和数据处理两个子系统。图所示为惯性加载式动态标定原理图,其上半部分即为数据采集系统,力传感器和位移传感器输出的微弱电压信号经过信号调理器放大调理为大量程电压信号,通过数据采集卡采样后保存至工控机内。而数据处理系统则调用釆集的数据进行滤波,求取系统参数并输出本节主要介绍数据采集系统的工作原理、组成及采集软件的设计。2.2.1数据采集原理数据采集是本标定系统最重要的基础环节。在这个过程中传感器输出的模拟信号经脉冲序列采样后,成为时间离散信号,再量化以后得到取值也是离散化的数字信号,其采集过程如图2-5所示。如果,如图2-6所示,则会出现频率混靖现象。上图采样频率满足采样定理,能完全恢复原倍号;下图采样频率过低,产生频率混叠。故在采集过程中需要合理确定采样频率,以保证后期数据处理时能完全恢复原信号而不失真。2.2.2数据采集设备2.2.2.1力传感器与信号调理器本次标定的对象传感器是美国公司的应变式双向力传感器。信号调理器采用与力传感器匹配的美国公司的型信号调理器,其主要功能为给力传感器提供激励电压,同时对力传感器输出信号进行放大、调理等工作。2.2.2.2位移传感器位移传感器采用的拉杆系列线性位置传感器,其独立线性率为0.05%,能满足本标定的精度要求,内置放大模块可直接输出0~5V电压。其灵敏度为0.03433V/mm。2.2.2.2数据采集卡本标定系统需要采集2路数据,力传感器输出和位移传感器输出,且不需要过高的采样频率,实验室己有的研华PCI-1716L型数据采集卡已能满足要求,其拥有16路单端或8路差分模拟输入通道,最高采样频率位分辨率250MS/s。对于工程常用的量程±10V的16位数据卡,在进行A/D转换时,采用四舍五入的原则处理余数,这样最大的由量化引起的模拟量的真值与A/D转换的数据的差值为1620/2,即:此精度足以满足本系统的需求。2.2.2.2计算机及其他设备本次标定使用的计算机为研华IPC-510工控机,酷睿2双核处理器,内存1G,主板提供一个PCI-eX16槽,二个普通PCI槽,一个PCI-eX1槽,用于安装数据采集卡,机箱后置RS-232串口,能满足各种通讯功能。为了使得系统能够正常工作还需要电源滤波器,接线端子板,转换器等其他附属设备。搭建完成后的正弦力惯性加载式动态标定系统如图所示。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码

 zakuzeon
zakuzeon
本文标题:某控制系统介绍
链接地址:https://www.777doc.com/doc-2290828 .html