您好,欢迎访问三七文档
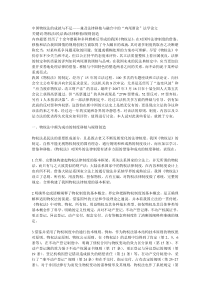
机器人的控制系统机器人复制的概念是容易理解的。其中心思想是用机器人复制机器人,从而在工厂实现机器人的自动生产。为了快速准确地控制机器人,应该保持机器人手臂的稳固,还应尽量减轻其重量。对轻便灵活的机械臂实施控制时,应满足的规格要求为:(1)按2%准则的调节时间小于2s;(2)阶跃响应的超调量小于10%;(3)阶跃响应的稳态误差为零。1、系统职能框图机器人控制系统的职能框图如图所示:给定信号串联校正电压功率放大器电机机器人手臂反馈校正速度及位置反馈扰动输出位置Y(0)__2、数学模型传递函数系统使用了速度反馈和前向控制器)(sGc。因为机器人是非常轻便和灵活的,我们把机械臂自身的传递函数取为:)(1)()Y(2sGssUs其中)225096)(25012)(10()9003612)(10044()(2222ssssssssssG于是,机械臂的复零点为:1002js和3006js复极点为:501js和1503js当02K,而控制器只是一个可调增益放大器])([1KsGc时,系统随1K变化的根轨迹(图一)。可以看到,当01K时,系统有两个特征根出现在s的右半平面,应此系统是不稳定的。n1=[1410004];n2=[11290036];n=conv(n1,n2);d1=[1,0,0];d2=[1,10];d3=[1,2,2501];d4=[1,6,22509];d=conv(conv(conv(d1,d2),d3),d4);rlocus(n,d)axis([-5050-350350]);-50-40-30-20-1001020304050-300-200-1000100200300RootLocusRealAxis(seconds-1)ImaginaryAxis(seconds-1)图一必须引入速度负反馈(2K为正)才能使上述的系统稳定,此时有SKsH21)(,则系统的开环传递函数变成:)225096)(25012)(10()9003612)(100044)(1()()(1222222212ssssssssssKsKKsHsGs其中,1K是前向通路控制器)(0sG的增益。调节1K,2K两个参数。首先取1052K,以保证将新增加的开环零点21Ks配置在原点附近。当1K变化而2K=5时,得到的根轨迹如下图。-30-20-100102030-300-200-1000100200300RootLocusRealAxis(seconds-1)ImaginaryAxis(seconds-1)当8.01K,52K时,系统阶跃响应的超调量为%12%,调节时间为sts8.1。如果尝试取71K,42K,则超调量都会超出指标要求。因此,现得到的系统在当前配置下的最佳响应。还可以使用具有零点和极点的控制器)(sGc,而速度反馈增益仍然保持为52K。pszsKsGc)()(1若控制器的参数取1z,5p,则当51K时,系统阶跃响应的超调量为%8%,调节时间sts6.1。3、方块图机器人控制系统的方块图如图所示:R(s)预期的位置)(sGc)(sU)(sGs1s12K__Y(s)位置4、稳定性分析当1K变化,而52K时系统的传递函数为:)225096)(25012)(10()9003612)(100044)(15()()(12222212sssssssssssKsHsGs劳斯阵列为:1.0e+09*0.00000.00000.056900.00000.00030.563000.00000.0256000.00030.5630000.00800000.56300001.12590001.1259000由劳斯阵列的第一列系数符号全为正值,所以控制系统稳定。5、误差分析开环传递函数:)225096)(25012)(10()9003612)(100044()(2222ssssssssssG误差信号:)()()(sCsRsE误差传递函数:)(11)()()(sGsRsEse输入信号:21)(ssR系统误差:)225096)(25012)(10()9003612)(100044()(1)()()(22222000limlimlimsssssssssssGssRssEesssss得:mmKess1.015.0得到510K6、系统的根轨迹分析(1)根轨迹曲线对称于实轴。(2)实轴上根轨迹分布在0和-10之间和501j向右实轴,及1503j向左的实轴上。(3)245211mnzpmjjniia渐近线与实轴正方向的夹角为:180,165,15。(4)根据分离点公式05011501115031150311jdjdjdjdd解此方程得:23.1,23.521dd其中,2d不在根轨迹上,舍弃;1d在根轨迹上,是分离点。(5):分离点的分离角为90。(6):求根与虚轴的交点。令,jws代入闭环特征方程:0)6(21538*35wKww0106.5310604188*24Kww解此方程得:4.49,4.49,0w64,64,0*K其中,0w对应0K是根轨迹起点。4.49w对应6464K,是根轨迹与虚轴的交点。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码









 leafyej
leafyej
本文标题:机器人的控制系统
链接地址:https://www.777doc.com/doc-2324986 .html