您好,欢迎访问三七文档
当前位置:首页 > 临时分类 > 基于NE555红外接近检测器设计与电路原理
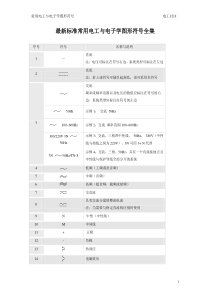
基于NE555红外接近检测器设计与电路原理时间:2012-4-1211:02:52核心提示:该红外接近检测器电路由NE555、红外发射二级管、红外接收头、电源稳压LM7805构成。电路原理见图1,该电路可以用于自动开门、自动放水、自动照明、防盗报警等领域。图1:基于NE555的红外接近检测电关键字:NE555红外检测器电路该红外接近检测器电路由NE555、红外发射二级管、红外接收头、电源稳压LM7805构成。电路原理见图1,该电路可以用于自动开门、自动放水、自动照明、防盗报警等领域。图1:基于NE555的红外接近检测电路原理发射器部分由作为振荡器工作的NE555定时器IC2为核心。IC2的输出经限流电阻R4送到红外发射二极管(IR)发送红外信号.发射器的振荡频率为38kHz,占空比为50%,以满足检测器/接收器模块的要求。红外接收头选用西门子公司的SFH5110-38,调谐频率为50%,占空比为38kHz连续方波。接收器部分由红外线接收模块Ic3、NE555单稳触发器IC4和LED指示器组成。根据收到的红外信号,Ic4触发导通,并在接收红外信号的周期内维持导通。当信号中断时,单稳电路IC4在几秒钟后关闭,具体时间由定时元件R7和C6确定(T=1.1R7×C6)。因此,若R7=470kΩ,C6:4.7μF,则单稳周期约为2.5秒。发射器和接收器可单独安装在PCB板上,红外线接收模块必须安装在红外线LED的后面,以避免由于红外线泄漏而导致虚假指示。图2是推荐的红外线LED与红外线接收模块分隔安装的示意图。字串5图2:红外接近检测器安装的示意图在附近移动的物体反射由红外线LED射出的红外线。红外线接收模块的灵敏度角约为0-60°。因此,当反射的红外线被检测到时,IC4被触发,其输出信号可以以任何需要的方式使用。例如,当有人接近时,通过继电器吸合来接通一照明灯。在此人离去几秒钟(单稳时间)后就自动关断。检测器的灵敏度取决于与红外线LED串联的限流电阻H4.接近检测的范围大约为40cm.若取R4为20Ω时,可以检测到25cm处的物体。而改用R4为30Ω时,检测范围就减少至22.5cm.loadabcsasbscomegaM1BLDC-TRIANGLEloadabcsasbscomegaM2BLDC-TRIANGLEloadabcsasbscomegaM3BLDC-TRIANGLEloadabcsasbscomegaM4BLDC-TRIANGLE用单片机控制红外编码探测障碍物发布:2011-09-02|作者:|来源:liaoziruo|查看:798次|用户关注:1探测障碍的原理在室内自动感知障碍的设备中,常使用红外线探测障碍物的存在与否。探测的基本原理是:在测量的范围内,主动向探测方向发射红外信号,如果存在障碍物,就会把发射的信号反射回发送端。在发送端,如果收到反射的信号,就确认障碍物的存在。但是在实际应用中,红外干扰源较多;而且在有反射光的情况下,由于光线的干扰,很容易判断失误,出现虚警。因此,有些设备在发射信号时,改进为发送一串连续的红外脉冲,然后接1探测障碍的原理在室内自动感知障碍的设备中,常使用红外线探测障碍物的存在与否。探测的基本原理是:在测量的范围内,主动向探测方向发射红外信号,如果存在障碍物,就会把发射的信号反射回发送端。在发送端,如果收到反射的信号,就确认障碍物的存在。但是在实际应用中,红外干扰源较多;而且在有反射光的情况下,由于光线的干扰,很容易判断失误,出现虚警。因此,有些设备在发射信号时,改进为发送一串连续的红外脉冲,然后接收反射的信号。如果接收到的红外脉冲数量超过某一门限值时,就判断障碍存在。这种方法尽管在一定程度上可以降低虚警率,但实验表明,在较强的反射光和使用电子镇流器方式的日光灯起辉时,仍很容易出现干扰现象。本文提出解决干扰的方案是:由单片机控制发射有一定意义的红外编码脉冲串,同时,单片机接收该脉冲串。如果接收到的信号和发射的信号基本一致,才判断为有障碍物的存在。探测障碍的原理框图如图1所示。图1探测障碍原理框图2电路设计在实测电路中,使用台湾义隆公司的EM78P156E单片机,红外发射管为MIE552A2,红外接收头为宁波甬晶微电子有限公司的NB0038,电路如图2所示。图2红外编码探测障碍电路当需要探测障碍物时,单片机U1首先让U2红外接收头NB0038接通电源。在发射电路中,D2为红外发射管,U1的P51引脚输出编码脉冲,通过Q2控制D2发射红外信号。当有红外信号进入接收头时,U2的输出端出现高电位,并送到U1的P67引脚。NB0038是用于红外接收的一体化接收头,采用环氧树脂封装,把独立的PIN二极管同前置放大器集成在同一封装上。其内部结构框图如图3所示。接收的载波中心频率为38.0kHz。图3NB0038内部结构框图3编码脉冲的产生和接收在实际使用中,由于EM78P156E单片机的工作频率是4MHz,载波脉冲采用26μs,其中高电位是10μs,低电位是16μs,占空比是38.5%。在产生载波时,要检测是否有反射信号。反射信号的检测是单片机利用低电位的16μs时间内判断接收引脚是否存在相应的发射信号。为了确定需要编码的调制信号脉冲宽度,在1000个NB0038的接收头中,随意选择30个作实验。在约20cm的距离内出现表面不光滑的障碍物,从单片机通过红外发射管发射信号到NB0038接收信号,检测出现在接收引脚为高电平时的载波脉冲量如表1所列。表1载波脉冲数统计因此,选择调制信号脉冲为24个载波脉冲宽度为:发射信号的格式如图4所示。图4发射信号的格式3.1编码“1”脉冲产生和接收(1)产生一个占空比为38.5%的载波脉冲首先,使红外发射控制P51=1,发射红外信号,保持时间是10μs。然后,重新使P51=0,停止发射红外信号,保持时间是16μs。(2)判断是否存在反射信号“1”在发射到第17、19、21和23个载波脉冲时,在停止发射红外信号的16μs内,检测接收引脚P52。如果P52=1,则表明存在反射信号;如果P52=0,则认为无反射信号。在这4次判断过程中,如果有3次以上判断为存在反射信号,则确认接收到反射的“1”。实现的软件流程如图5所示。3.2编码“0”脉冲产生和接收当发射“0”脉冲时,停止发送任何红外信号。在相当于第17、19、21和23个载波脉冲时间的时候,检测接收引脚P52。如果P52=1,则表明存在干扰的红外信号;如果P52=0,则表明没有其他红外信号的干扰。在这4次判断过程中,如果有3次以上判断为没有其他红外信号的干扰,则确认正确地接收到“0”。实现的软件流程如图6所示。图5发送编码“1”流程图6发送编码“0”流程4抗干扰能力分析在应用中,发现发送和接收低于6位的编码脉冲,仍然有一定的受干扰现象发生;但发送和接收高于10位的编码脉冲,已经具有较强的抗干扰能力。实际上,在发送编码为“0”时,是没有红外信号存在的。对于随机而频繁的干扰信号,这时很容易检测到干扰的存在。发送编码的实质是:①当编码位为“1”时,检测是否存在障碍物。这时如果有信号的反射,则表明在测量的范围内有障碍物。如果接收不到反射的信号,说明没有障碍物,或者是障碍物超出测量的范围。②当编码位为“0”时,检测是否存在干扰。这时如果有干扰信号,则表明发射“1”测到的障碍物,有可能是由于有干扰信号而导致的错误判断。5编码的方案应用中,发送编码的方案有3种:①发送较短的编码串(10~16位),判断时间约6~10ms。在接收过程中,不能有一位的误码,否则认为是干扰,要等待下一次的障碍检测。这种方案在检测过程中,不能存在干扰。②发送大于16位的编码串(16~32位),判断时间约10~20ms。对接收“0”和“1”的编码误码统计,其中可以根据应用场合的需要,存在1~2位“0”的误码和1~3位“1”的误码,这样能有效提高抗干扰能力。③发送大于32位编码串,判断时间20ms。根据实际情况来分析接收的编码,以判断障碍的存在。实际应用中,采用24位编码,分3次发出。3次发射的编码如表2所列。表2发射的脉冲编码表当不多于2位“0”的误码和2位“1”的误码时,确认障碍物的存在。红外线障碍物探测器--Infra-reddetectors时间:2009-04-0622:39来源:作者:点击:117次这种红外线障碍物探测器不仅能用于机器人行进跟踪控制,而且还可作为家庭和商店自动控制系统的重要部分。电路核心部分采用一只红外线发射LED(IR1)和一只红外线接收二极管(IR2)。这种红外线障碍物探测器不仅能用于机器人行进跟踪控制,而且还可作为家庭和商店自动控制系统的重要部分。电路核心部分采用一只红外线发射LED(IR1)和一只红外线接收二极管(IR2)。用5V稳定直流电压对电路供电。工作时由IR1向外发射不可见的红外线短光束,经障碍物或目标反射后由IR2接收。探测到障碍物后,由扬声器LS1发出提示告警。LED1用于电源接通指示。IR1和IR2可以采用现成的集成光反射传感器CNY70,也可以用独立的IR1和IR2自行组合。图1是探测器电路。电路中的LM555芯片(IC1)接成多谐振动器.其输出脉冲宽度可在1ms-10ms范围内用VR1、R1、R2和C1任意调节。输出脉冲由IC1③脚输出,经小功率晶体管T1缓冲后驱动红外线发射管IR1,R4用来限制IR1的输入电流。当反射后的红外光束落到IR2上时,R5有电流流过,使T2基极获得正电压而导通,导通后又使报警驱动晶体管,T3保持正偏,直至障碍物被清除为止。T3导通后,电路第二只多谐振荡器CD4047(IC2)由于其⑤脚变高电位而激活,振荡频率为音频可闻信号,经达林顿对管T4和T5放大后用扬声器LS1放声,R10用来限制扬声器电流。电路如用于控制机器人的行进路线.可利用T3的高电平输出直接控制机器人内部的继电器/马达驱动电路。此电路探测障碍物的有效范围为10cm。图2是IR1和IR2的安装示意图。内容来自青少年科技网,欢迎大家光临!:
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 20041116
20041116
本文标题:基于NE555红外接近检测器设计与电路原理
链接地址:https://www.777doc.com/doc-2534639 .html