您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 机械/模具设计 > 基于多色集合理论的机械产品概念创新设计研究
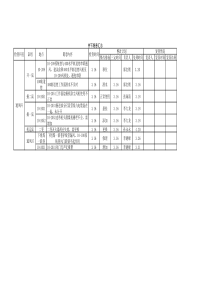
1基于多色集合理论的机械产品概念创新设计研究高新勤,李宗斌(西安交通大学机械工程学院CIMS所,710049,西安)摘要:对机械产品概念创新设计的形式化方法进行了研究。将用于方案创新设计的功能推理技术和用于机构创新设计的机构运动链发散方法结合起来,建立了基于多色集合理论的机械产品概念创新设计过程模型,给出了创新设计的主要步骤。接着,利用多色集合理论的元素、统一颜色、个人颜色等概念及多色图,建立了工业机械手手部形式化功能模型、方案元库和推理矩阵,实现了从产品初始功能需求到方案元表示的原始方案集的形式化推理过程。最后,提出了基于多色集合理论的机构运动链发散方法和规则,通过多色集合的体、笛卡儿积和析取运算,得到与初始方案集中机构方案元具有相同杆件和运动副数目的所有可能的一般化链和机构简图。以瓦特链为例验证了这种机构创新方法。研究表明,基于多色集合理论建立的机械产品概念创新设计过程模型易于形式化描述和推理,推动了方案创新和候选机构型的自动生成。关键字:多色集合;工业机械手;创新设计;运动链发散;形式化方法StudyonConceptualInnovativeDesignofMechanicalProductBasedonPolychromaticSetsTheoryGaoXinqin,LiZongbin(CIMSInstitute,Xi’anJiaotongUniversity,Xi’an710049)Abstract:Formalmethodofconceptualinnovationdesignformechanicalproductisstudied.Functionreasoningtechnologyofschemesinnovationandkinematicchainsynthesisofmechanismsinnovationareintegrated.Basedonpolychromaticsetstheory,aprocessmodelofconceptualinnovationdesignformechanicalproductisadvancedandmainstepsofinnovativedesignarelisted.Sequentially,theunifiedcolorsets,individualcolorsetsandpolychromaticgraphsareappliedtoestablishaformalizedfunctionmodelandamethodatomsbaseandrelatedreasoningmatrixesforindustrymanipulator’shand.Theformalreasoningprocessfromproductdemandstomethodatomisdeveloped.Finally,Mechanismsynthesisalgorithmandrulesbasedonpolychromaticsettheoryarebroughtforward.AllthecertaintiesofpolychromaticsetscanbeobtainedbyusingdisjunctionoperationandCartesianproduct.Certainties’elementsetspermutationiscarriedouttogenerateallpossiblemechanismchainsanddiagramswiththesamenumberjointsandlinksoforiginalmethodatom.AnexampleofWatt-chainisprovidedforfurtherexplanationandvalidation.Resultsshowthattheprocessmodelofconceptualinnovationdesignformechanicalproductcanbedescribedandreasonedwithformalmethod,whichpromotesschemesinnovationandcomputerizationofselectivemechanisms.Keywords:polychromaticsets;industrymanipulator;innovativedesign;mechanismssynthesis;formalmethod1引言机械产品概念设计是根据产品生命周期各个阶段的要求,进行产品功能分解、从功能到方案的映射以及方案载体创新的系统化设计。其中,系统方案创新和方案元机构创新是关键的内容,必须用适当的形式化方法来实现这一概念创新设计过程。同时,概念设计也是一个发散思维的过程,机械产品概念设计最终可归结为机构结构类型创新和变异[1],也就是机构运动链的发散。产品方案创新过程的形式化描述以及机构运动链发散的形式化表示是实现机械产品计算机辅助概念设计的基础。多色集合(PolychromaticSets,简称PS)是一种新的系统理论和信息处理工具,它能够方便地使用标准的数学模型描绘复杂机械产品的各种特征和特征之间的相互关系和联系[2],能够在机械产品功能模型的描述、推理以及机构运动链发散过程中发挥作用,且该方法很方便用于计算机编程。本文首先将方案创新设计的功能推理技术和机构创新设计的机构运动链发散方法结合起来,建立了基于多色集合理论的机械产品概念创新设计过程模型。然后以工业机械手手部的概念创新设计为例,建立了形式化功能模型、方案元库和推理矩阵,完成了从产品初始功能需求到方案元表示的原始方案集的2推理过程。最后以瓦特链为例,通过多色集合的体、笛卡儿积和析取运算,完成了基于多色集合理论的机构运动链发散过程,应用和验证了这种机构创新方法。2机械产品概念创新设计过程模型机械产品的概念设计过程可以概括为方案创新设计和机构创新设计两个阶段,前者通过功能结构模型及其推理技术,解决功能到结构之间的映射,生成原始方案集;后者通过机构运动链发散方法,完成机构类型变异。二者结合,生成机械产品概念设计的可行方案集。图1所示为建立在多色集合理论基础上的机械产品概念创新设计过程模型。用户需求原始方案集可行方案集方案创新设计基于多色集合理论的功能模型和推理技术基于多色集合理论的机构运动链发散方法机构创新设计图1机械产品概念创新设计过程模型该设计过程模型由以下主要步骤组成:Step1:根据用户需求,建立基于多色集合理论的形式化功能模型。Step2:利用多色集合理论的元素、统一颜色、个人颜色及多色图,建立推理矩阵。Step3:从总功能开始,逐层推理直到方案元,完成方案创新设计过程,生成原始方案集。Step4:分析原始方案集中的机构方案元,写出其拓扑构造矩阵。Step5:根据一般化规则和数综合理论[3],画出一般化运动链图谱。Step6:列出设计要求和约束条件,根据机构运动链发散规则,建立多色集合布尔矩阵。Step7:求多色集合的体和笛卡儿积,根据机构运动链发散规则和设计要求与约束条件,排除各种不合理子集,如同构机构。Step8:将特定化运动链回归为用机构简图表示的方案元,挑出原始方案集中的方案元,剩余机构即为机构创新设计得到的新方案元。下面以工业机械手手部的概念创新设计为例,从方案创新和机构创新两方面说明基于多色集合理论的产品概念创新设计形式化方法。3基于多色集合理论的功能模型及推理技术3.1形式化功能模型工业机械手手部是直接用于抓取或握紧工件进行操作的部件。由于用途不同,工业机械手手部在功能上有很大的差异。这里主要考虑用于搬运作业的机械手手部,其功能为以一定的力量抓放工件[4]。在多色图(,)GAC中,节点集合A描述产品按照总功能逐层分解,直到可以由方案元来实现的过程。边的集合C描述了功能节点间存在的各种约束关系。将功能和实现功能的方法(最底层除外)以有序对的形式表示为11((,,));(,,)kkkkFAkijAkij。其中,1(,,)kkAkij表示第k层、第ki个节点,其父节点为1k层的第j个节点,1((,,))kkFAkij表示对应节点的颜色,它描述了节点的性能、参数等属性。图2所示为采用多色集合理论建立的工业机械手手部形式化功能模型。F(A(1,2,0)):F18F19...F112A(1,1,0):a1a2...a7A(1,2,0):a8a9...a12F(A(0,0,0)):F01F02...F017;A(0,0,0)01F(A(1,1,0)):F11F12...F17F(A(1,3,0)):F113F114A(1,3,0):a13a143图2工业机械手手部功能模型3.2特征提取和推理矩阵工业机械手手部的设计主要与抓放工件的重量、形状、尺寸、材料以及表面损坏性有关[4]。由图2可知,其方案创新设计过程可以分为两层。第0层:0001217((0,0,0))FAFFF表示工业机械手的总功能。其中,工件重量:F01-轻,F02-较重,F03-重;工件形状:F04-圆柱形,F05-方形,F06-薄板形,F07-细小棒形,F08-球形,F09-管状,F010-不规则形状;工件尺寸:F011-小,F012-较大,F013-大;工件材料:F014-金属导磁,F015-非导磁性物质;工件表面的损坏性:F016-粗糙不易损坏,F017-光滑易损坏。第1层:111127((1,1,0))FAFFF表示传力机构。其中,F11-滑槽杠杆传力,F12-连杆杠杆传力,F13-弹簧杠杆传力,F14-斜楔杠杆传力,F15-齿轮齿条传力,F16-平面杠杆平行移动传力,F17-内卡传力。1118912((1,2,0))FAFFF表示手指形状。其中,F18-V型,F19-平面,F110-细长尖指,F111-内卡指,F112-特形手指。111314((1,3,0))FAFF表示吸附方式。其中,F113-气吸,F114-磁吸。方案元库A中,127(1,1,0))Aaaa,8912(1,2,0))Aaaa,1314(1,3,0))Aaa,如图3所示。边的集合C实际上是节点集合的自相关矩阵,即,[]()ijAACcAAij,求取如下:((0,0,0));(0,0,0)FAA((1,1,0))FA((1,2,0))FA(1,1,0)A(1,2,0)A0000000((0,0,0));(0,0,0)1000000((1,1,0))1000000((1,2,0))1100000((1,3,0))0100000(1,1,0)0010000(1,2,0)0001000(1,3,0)FAAFAFAFAAAAC((1,3,0))FA(1,3,0)A所以,共有六条边,记为213141526374(,,,,,)Ccccccc。a1滑槽杠杆式a2连杆杠杆式a3弹簧杠杆式a4斜楔杠杆式a5齿轮齿条式a6平面杠杆式a7内卡式a8V型指a9平面指a10细长指a11内卡指a12特型指a13真空吸盘a14电磁吸盘图3方案元库41((,,))kkFAkij和1((1,,))kkFAkii,即相邻层功能之间的关系采用多色集合中统一颜色和个人颜色的布尔矩阵[()()]FaFA建立推理矩阵①:[((1,1,0))((0,0,0));(0,0,0)]FAFAA、②:[((1,2,0))((0,0,0));(0,0,0)]FAFAA、③:[((1,3,0))((0,0,0));(0,0,0)]FAFAA。当1(,,)llAlijA时,1((,,))llFAlij和1(,,)llAlij,即功能与实现该功能的方案元之间的关系采用多色集合中统一颜色和组成元素的布尔矩阵[()]AFA建立推理矩阵④:[(1,1,0)((1,1,0))]AFA、⑤:[(1,2,0)((1,2,0))]AFA、⑥:[(1,3,0)(
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码






 yning009a
yning009a
本文标题:基于多色集合理论的机械产品概念创新设计研究
链接地址:https://www.777doc.com/doc-2536493 .html