您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 机械/模具设计 > 基于UGNX4.0连杆机构的运动学仿真
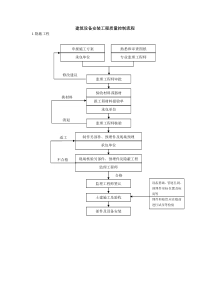
基于UGNX4.0的连杆机构运动学仿真摘要:介绍了软件UGNX4.0的机构仿真功能,在此基础上对连杆机构的仿真过程作了较详细的陈述,给出其位移、速度和加速度曲线,为利用UG实现机构的CAD/CAE一体化作出有益的探索。关键词:连杆机构;运动仿真;UG;CAD;CAE一、引言UG软件是Unigraphics软件的简称,它汇集了美国航空航天和汽车工业的专业经验,以CAD/CAM/CAE一体化而著称1。CAE包括两大内容:一、有限元分析;二、机构分析。机构分析模块可以提供静态、运动、动力学计算以及动态仿真等功能。其运动分析采用了美国MDI公司开发的ADAMS解算器。UG为机械工程师提供了CAD/CAE/CAM集成的虚拟产品开发环境。本文利用UGNX4.0CAD/CAE对六连杆曲柄滑块机构进行运动学分析,便捷地得到了滑块的运动特性。二、六连杆机构的二维模型的生成机构分析主要包括运动分析和力分析。其实两者是密切相关的,只是为了分析方便,前者先不考虑作用在机构上的力,并通常假定原动件作等速运动,只从几何上分析机构的位移、速度和加速度等运动情况2。利用UGModeling模块中的曲线功能建立六连杆滑块机构的二维模型。(见图1)也可以分别建立各个连杆的三维模型,然后利用装配功能将各个连杆装配起来建立三维机构模型。图1六连杆曲柄滑块机构三、连杆机构的运动学仿真在UG中的应用中选择Motion便可以进入机构分析模块。(一)Motion模块中的预设置首先要设置机构对象的各种参数,在此选择角度单位为弧度,系统默认是度数。运动场景选择运动学仿真。1.定义连杆特性在UG中所有运动构件都可以看成是连杆,可以分别定义L001~L005连杆(其中机架可以不定义)2.定义运动副机构中均为低副。分别定义旋转副J001~J006,J007定义为滑动副。其中J001为原动件,添加角速度ω0=10rad/s,J003和J004为复合旋转副。(二)机构的运动仿真选择基于时间的机构动态仿真。定义时间为0.4s,内分400步,即每步为0.04s分析的情况。进入ADAMS解算过程,系统会自动模拟机构运动的全过程。仿真结束后,可以通过图形的形式输出J007滑动副的运动情况。(见图2~4)JOO70.000100.000200.000300.000400.000500.000600.000700.000050100150200250300350400450MechanismsStepJ007_X,Displacement(abs)JOO7-2000.000-1000.0000.0001000.0002000.0003000.0004000.000050100150200250300350400450MechanismsStepJ007_X,Velocity(abs)图2位移图3速度JOO7-120000.000-100000.000-80000.000-60000.000-40000.000-20000.0000.00020000.00040000.00060000.00080000.000050100150200250300350400450MechanismsStepJ007_X,Acceleration(abs)图4加速度四、结论从各曲线中可以得到滑块的位移、速度、加速度等信息。改变J001原动件的速度以及相关的机构参数,相应的会得到新的设计结果,便于对机构的运动特性进行控制。设计的更改可以反映在装配主模型的复制分析方案中,再从新分析,一旦确定优化的设计方案,设计更改就可以直接反映到装配的主模型中3。凭借UG运动分析模块可以对机构进行过程模拟,为进一步进行动力学分析奠定基础,对缩短产品开发周期,提高产品质量和性能有着积极的作用。参考文献[1]马秋成韩利芬等.UGCAE篇[M].北京:机械工业出版社,2002[2]金芝英鲁明山等.机械原理[M].北京:宇航出版社,19873[3]张方瑞于鹰宇等.UGNX2高级实例教程[M].北京:电子工业出版社,2005
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码
 xindian001
xindian001
本文标题:基于UGNX4.0连杆机构的运动学仿真
链接地址:https://www.777doc.com/doc-2572508 .html