您好,欢迎访问三七文档
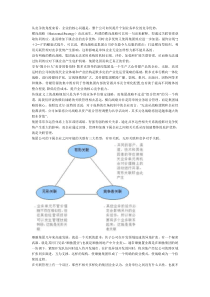
4P-Q分解法潮流计算4.1P-Q分解法的基本原理P-Q分解法是从简化一极坐标表示的牛顿-拉夫逊法潮流修正方程基础上派生出来的,考虑到了电力系统本身的特点。牛顿法潮流计算的核心是求解修正方程式。当节点功率方程式采用极坐标系统时,修正方程式为[∆P∆Q]=[HNJL][∆δ∆U/U](4.1)将其展开为{∆P=H∆δ+N(∆U/U)∆Q=J∆δ+L(∆U/U)(4.2)对修正方程式的第一步简化是:计及电力网络中各元件的电抗远大于电阻,以致各节点电压相位角的改变主要影响各元件中的有功功率及各节点的注入有功功率;各节点电压大小的改变主要影响元件中的无功功率以及各节点的注入无功功率;式(4.2)中子阵N及J中各元素的数值相对很小,因此可以略去,从而将式(4.2)简化为{∆P=H∆δ∆Q=L(∆U/U)(4.3)但是,H、L中的元素是电压的函数,在每次迭代中都要重新形成上述H、L矩阵,并且又都是不对称矩阵,仍然相当麻烦。对修正方程式的第二步简化是:由于有对状态变量δi的约束条件|δi−δj||δi−δj|max,即线路两端电压的相角差是不大的,再计及Gij≪Bij,可以认为cosδij≈1Gijsinδij≪Bij于是,Hij和Lij的表达式Hij=∂∆Pi∂δj=−UiUj(Gijsinδij−Bijcosδij)i≠jLij=∂∆Qi∂UjUj=−UiUj(Gijsinδij−Bijcosδij)i≠j可简化为Hij=UiUjBijLij=UiUjBij(4.4)再由式Hii=Ui2Bii+Qi(当i=j,sinδij≈0,cosδij≈1时)(4.5)Lii=∂∆Qi∂UiUi=−Ui∑Uj(Gijsinδij−Bijcosδij)+2Ui2Bii=Ui2Bii−Qij=nj=1j≠i(4.6)按自导纳的定义,上两式中的Ui2Bii项应为各元件电抗远大于电阻的前提下除节点i外其他节点都接地时由节点i注入的无功功率。这功率远大于正常运行时节点i的注入无功功率Qi,即Ui2Bii≫Qi,故式(4.5)和式(4.6)又可化简为Hii=Ui2BiiLii=Ui2Bii(4.7)上式中显然有Hii=Lii,Hij=Lij。在假设无PV节点时,即m=n。这样,式(4.3)中的系数矩阵可以表示为H=L=[U1B11U1U1B12U2U1B13U3⋯U2B21U1U2B22U2U2B23U3⋯U3B31U1U3B32U2U3B33U3⋯⋮⋮⋯]=[U10U2U30⋱][B11B12B13⋯B21B22B23⋯B31B32B33⋯⋯⋯⋯][U10U2U30⋱](4.8)将式(4-8)代入式(4-3)中,展开后可以把修正方程式变为[∆P1∆P2∆P3⋯∆Pn]=[U10U2U3⋱0⋱][B11B12B13⋯B1nB21B22B23⋯B2nB31B32B33⋯B3n⋯⋯⋯⋯Bn1Bn2Bn3⋯Bnn][U1∆δ1U2∆δ2U3∆δ3⋯Un∆δn](4.9)[∆Q1∆Q2∆Q3⋯∆Qn]=[U10U2U3⋱0⋱][B11B12B13⋯B1nB21B22B23⋯B2nB31B32B33⋯B3n⋯⋯⋯⋯Bn1Bn2Bn3⋯Bnn][∆U1∆U2∆U3⋯∆Un](4.10)将上两式等号左右都用以下矩阵左乘[U10U2U3⋱0⋱]−1=[1U101U21U3⋱0⋱]可得[∆P1/U1∆P2/U2∆P3/U3⋯∆Pn/Un]=[B11B12B13⋯B1nB21B22B23⋯B2nB31B32B33⋯B3n⋯⋯⋯⋯Bn1Bn2Bn3⋯Bnn][U1∆δ1U2∆δ2U3∆δ3⋯Un∆δn](4.11)[∆Q1/U1∆Q2/U2∆Q3/U3⋯∆Qn/Un]=[B11B12B13⋯B1nB21B22B23⋯B2nB31B32B33⋯B3n⋯⋯⋯⋯Bn1Bn2Bn3⋯Bnn][∆U1∆U2∆U3⋯∆Un](4.12)或简写为∆P/U=B′U∆δ(4.13)∆Q/U=B′′∆U(4.14)这就是P-Q分解法的修正方程式。式中,等号左侧向量中的有功、无功功率不平衡量∆Pi、∆Qi如下式。{∆Pi=Pi−Ui∑Uj(Gijcosδij+Bijsinδij)j=nj=1=0∆Qi=Qi−Ui∑Uj(Gijsinδij−Bijcosδij)j=nj=1=0(4.15)为了改善P-Q分解法的收敛特性,B’与B”一般并不是简单的电力系统导纳矩阵的虚部。以下讨论B’与B”的构成。首先应指出,B’与B”的阶数是不同的,B’为n-1阶,B”低于n-1阶。因为式(4.14)不包含与PV节点有关的方程式,因此,如果系统有r个PV节点,则B”应为n-r-1阶。如前所述,式(4.13)以有功功率误差为依据修正电压向量的角度;式(4.14)以无功功率误差为依据修正电压幅值。为了加速收敛,使他们更有效地进行修正,可以考虑在B’中尽量去掉那些与有功功率及电压向量角度无关或影响较小的因素。为此,以电力系统导纳矩阵的虚部作为B’,但是去掉了充电电容和变压器非标准变比的影响。具体地说,B’的非对角元素和对角元素分别按下式计算B′ij=−xijrij2+xij2,B′ii=∑xijrij2+xij2j∈i=∑B′ijj∈i(4.16)式中rij和xij分别为支路ij的电阻和感抗。从概念上讲,应该在B”中去掉那些对无功功率及电压幅值影响较小的因素,例如,应去掉输电线路电阻对B”的影响。因此,B’’的非对角元素和对角元素分别按下式计算:Bij=−1xij,Bii=∑1xijj∈i−bio(4.17)式中bio为节点i的接地支路的电纳。4.2P-Q分解法潮流计算的特点与牛顿-拉夫逊法相比,PQ分解法的修正方程式有如下特点。1)以一个(n-1)阶和一个(m-1)阶系数矩阵B’、B”代替原有的(n+m-2)阶系数矩阵J,提高了计算速度,降低了对计算机储存容量的要求。2)以迭代过程中保持不变的系数矩阵B’、B”替代变化的系数矩阵J,显著的提高了计算速度。3)以对称的系数矩阵B’、B”替代不对称的系数矩阵J,使求逆等计算量和所需的储存容量都大为减少。4)P-Q分解法所采取的一系列简化假定只影响了修正方程式的结构,不影响最终结果。因迭代计算中,迭代收敛判据仍是∆Pi≤ε,∆Qi≤ε,其中的∆Pi、∆Qi仍按式(4.15)计算。所以P-Q分解法和牛顿-拉夫逊法一样可以达到很高的精度。4.3P-Q分解法程序原理框图输入原始数据求矩阵B’和B”设各节点电压和相角初值迭代次数K=0Kp=1,Kq=1计算不平衡功率ΔPi(k)计算ΔPi(k)/Vi(k)置KP=0解修正方程(4.13)求Δδi(k)δi(k+1)=δi(k)+Δδi(k)置KQ=1否计算不平衡功率ΔQi(k),计算ΔQi(k)/Vi(k)解修正方程(4.14)求ΔVi(k)Vi(k+1)=Vi(k)+ΔVi(k)置KP=1否K=K+1max{ΔPi(k)}εp?max{|ΔQi(k)|}εQ?KQ=0?是否置KQ=0否KP=0?否计算平衡节点及全部线路功率是输出是
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码
 dxawslqpv
dxawslqpv
本文标题:PQ分解法
链接地址:https://www.777doc.com/doc-2610731 .html