您好,欢迎访问三七文档
当前位置:首页 > 行业资料 > 冶金工业 > 专家模糊控制在碱性清洗液pH值控制系统中的应用
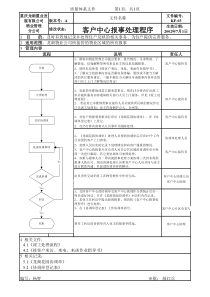
摘要:罐车清洗过程中,由于工作方式和环境条件的影响,碱性清洗液中pH具有非线性和时变性等特性。针对pH的过程特性,提出了专家模糊控制算法。此方法具有一定的预判断性,并能够简化部分计算过程,减少计算量,在满足一定控制精度的前提下,提高控制速度。且解决了完整精确数学模型难建立的问题,结合操作工人的实际生产经验及专家规则,实现了对清洗液pH值的闭环控制。并用MATLAB进行了仿真,验证了该方法的可行性和有效性。关键词:模糊控制,专家系统,MATLAB,仿真1引言在铁路罐车的生产及维修过程中,对罐体的清洗和检漏是工序要求中是必不可少的一环。在传统工艺中,通常选用管道自来水作为检测液,由于自来水厂对自来水的净化处理导致液体中负离子的含量很高,清洗过程中极易发生氧化反应,造成罐体生锈,对下一步生产环节产生影响,增加了除锈工作,工序过程复杂化,从而造成工作时间延长,工作效率降低。因此介于罐体材料的金属特性,为了避免清洗时潮湿环境中易发生的罐体金属材料氧化对下一步生产环节的影响,检测液的PH值需要严格控制在一定要求范围内,因此设置相应的水溶液pH值控制环节是非常有必要的。基于生产要求及工作条件,设计专家模糊控制系统并进行仿真验证。2模糊控制与专家系统的特点模糊控制是近代控制理论中建立在模糊集合论基础上的一种基于语言规则与模糊推理的控制理论,它是智能控制的重要分支之一。它通过模拟人的思维方法面吧人类社会的技术和非技术的生产经验,编写归纳成若干系统化的规则来代替数学模型的计算,由计算机处理,实现对实际系统的智能性控制。尤其在于一些复杂可变的,具有非线性、时变性的难以建立精确数学模型的被控系统的控制中表现出了很强的优势。模糊控制基本框图如图2.1所示:图2.1模糊控制系统框图专家系统是根据人们在某一领域内的知识、经验和技术而建立的解决问题和做出决策的计算机软件系统,可以对一些复杂问题给出专家水平的结果。通常由知识库、推理机、综合数据库、知识获取机制、解释机制和人机接口等相对独立的基本部分组成。专家系统基本框图如图2.2所示:图2.2专家系统基本框图3模糊控制方法与专家系统的结合模糊控制的量化因子Ke、Kec、和比例因子Ku是决定模糊控制器品质的重要手段,因此为了增强隶属度函数重合区域的灰度响应,避免产生震荡,引入专家系统对这三个重要参数进行调整,使系统同时提高动态响应和稳态精度,从而对被控对象进行有效的控制。专家模糊系统如下图所示:图3.1专家模糊系统框图4pH值过程控制的专家模糊控制器的设计4.1模糊控制器的设计被控对象具有非线性大滞后的特点。因此可以用一阶纯延时模型式4-1作为基本模型,来分析控制过程及其特点。(1)模糊控制器的结构本系统采用二维模糊控制器结构,以pH值给定值与测量值的误差和误差的变化作为输入量,以作为控制量的阀门的开度值作为输出量,其对应的模糊子集分别设为E、EC、U。误差的基本论域为[-150,150],误差变化的基本论域为[-60,60],控制量的基本论域为[-45,45],各量对应的论域为:E={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}EC={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}U={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}再根据人们习惯的语言性表述,将各个量的论域转化为对应的以语言变量表述的模糊集合,E模糊集语言变量均取为{负大,负中,负小,负零,正零,正小,正中,正大},即{NB,NM,NS,NZ,PZ,PS,PM,PB},EC及U的模糊集语言变量均取为{负大,负中,负小,零,正小,正中,正大},即{NB,NM,NS,ZO,PS,PM,PB}。误差将Z元素分为两个正零(PZ)和负零(NZ),增加元素量可以提高系统的稳态精度。(2)建立模糊控制规则根据铁路罐车维护车间以往生产实践的数据总结以及工人历年实际操作的经验,系统对检测液pH值的调节主要是依据测量值与给定值的误差E,及误差的变化EC来调整执行机构控制阀门的开度来调节的。用模糊条件语句描述相应的控制规则如下:IFE=NBANDEC=NBTHENU=PB;IFE=NBANDEC=NMTHENU=PB;IFE=NBANDEC=NSTHENU=PM;……IFE=PBANDEC=PMTHENU=NB;IFE=PBANDEC=PBTHENU=NB。共56条控制规则,可对应写成如表4.1系统的模糊控制规则表表4.1系统模糊控制规则表一般正常生产条件下,此规则足以指导生产过程的顺利进行。但若遇到条件突变的情况时,则可以由具有透明性和灵活性的专家系统,可以对控制规则进行完善和改进,使其更加完善,更好地指导控制过程。(3)绘制模糊集合的隶属函数曲线模糊集合的隶属函数隶属曲线一般有三角形,梯形,正态曲线等。曲线样式对控制系统的影响并不大,对控制效果有较大的影响是隶属函数曲线的形状分布,若曲线形状较窄,对模糊集合有较高的分辨率,控制灵敏度较高,若曲线形状较宽,则控制特性较为平缓,系统稳定性能较好。针对不同形状分布的隶属度函数,本文以式4-1所表示的一阶纯延时模型为被控对象进行仿真,从以下角度入手比较仿真结果:①隶属函数分布间隙对控制性能的影响。选区两个结构相同的模糊控制器,模糊化、模糊规则、去模糊化方法设置一致,只改变函数宽度,进行仿真。函数曲线如图4.1所示。图4.1有无间隙的隶属函数曲线仿真结果如图4.2所示:图4.2W不同隶属函数仿真结果由图4.2所示仿真结果可知,有间隙的隶属度函数所属控制器的系统响应曲线为锯齿状,无法达到期望值;而无间隙的隶属度函数所属控制器的系统响应曲线较为光滑,并不断接近且稳定在期望值。②隶属函数重叠率对控制性能的影响。同样采用情况①所用的系统进行仿真,只对隶属函数的重叠率进行不同的设置。仿真所采用隶属函数曲线如图4.3所示。图4.3重叠率不同的隶属函数曲线仿真结果如图4.4所示。图4.4重叠率不同隶属函数仿真结果由图4.4仿真曲线可以看出,宽度过小则系统易产生震荡从而无法达到期望值,宽度过大则易导致系统响应速度过慢。③隶属函数非线性分布对控制性能的影响。仍然采用情况①所用的系统进行仿真,只对隶属函数的分布是否为线性进行不同的设置。仿真所采用隶属函数曲线如图4.5所示。图4.5图4.5分布不同的隶属函数曲线仿真结果如图4.6所示。图4.6分布不同的隶属函数仿真结果由图4.6的仿真结果可以看出,线性隶属度函数所属控制器的响应时间较非线性隶属度函数所属控制器较长,不够灵敏,曲线上升较慢。综上分析,本系统采用形状简单的三角形函数作为模糊集合的隶属度曲线,在满足控制要求的同时既能减少计算量,还提高系统控制的灵敏度,隶属函数如式4-2:4-2在误差较大时,即测量值与给定值差值较大时可采用让形状较宽的隶属函数曲线即较宽,加快系统的响应速度。当误差较小时,即接近平衡点时,应选择形状较窄的隶属函数曲线即较窄,提高系统分辨率,避免出现过大的超调量。由专家经验和实际操作习惯确定隶属度最大模糊子集元素为:最大模糊子集元素再由三角隶属函数式4-2分别计算出误差E、误差变化EC以及控制量U模糊子集各个元素所对应的隶属度值,做出赋值表如表4.2、4.3、4.4。表4.2误差E的赋值表表4.3误差变化EC的赋值表表4.2误差E的赋值表根据各个模糊变量的隶属度及模糊关系计算出控制量的变化,做出查询表如表4.5所示。表4.5二维模糊控制变量U查询表将此表作为控制系统计算机离线查询依据,进行模糊控制规则的判定选择,从而由在线得到的检测量得到所需的控制量,从而指导pH调节过程。(4)选择量化因子和比例因子通过生产过程实际的数据积累和现场实际情况,根据误差、误差变化及控制阀开度的变化范围即各个量的基本论域,由式4-3、4-4、4-5计算得量化因子、,比例因子。从而实现精确量从其基本论域到其模糊集合的模糊化过程。以误差为例,其量化因子确定之后,系统的测量精确值即可模糊化到其对应的模糊论域内,设所得误差为,则可能的情况有:当结果为②、③时,精确量被分别模糊量化为。当结果为①时,若,时,则精确量被模糊量化为;若时,则精确量被模糊量化为。由计算过程可知,量化因子和比例因子的值都与所对应各个量的基本论域,及模糊论域有关,并不唯一,需要由专家系统来为不同控制阶段选择不同的量化因子,从而达到最优的控制效果。4.2专家知识库和规则库的设计专家系统与模糊控制结合构成的专家模糊控制器EFC(ExpertFuzzyController),不仅可以克服模糊控制在稳定点处易发生的周期性波动,提高系统的抗干扰性,还增强了系统的灵活性,可以增加系统相关的专家控制知识,使系统适应性提高,并能对系统进行改进和提高。本系统采用专家技术,在模糊规则内加入专家知识库和推理机构,以软件形式实现,从而增强系统的判断和推理能力。(1)知识库的建立。知识库同样采用IF(condition)THEN(action)条件语句结构,并在人机交互平台设置相关模块,便于专家及相关操作人员对知识的补充、修改和更新,充分发挥其相对独立结构的适应性和灵活性。(2)控制规则集。根据专家经验编写指导系统量化因子及比例因子的选择确定的相关控制规则,从而改善系统稳态性能及抗干扰性。本系统的6条相关规则按其优先级总结如下:其中、e、ec为误差和误差的变化δ1,δ2为允许误差和误差变化的范围α,β,a,b为经验常数R为给定值K1、K2、K3为由式4-3、4-4、4-5计算所得的量化因子Ke、Kec,比例因子Ku的初始值。(3)推理方法。推理方法采用向前推理的方法,按照规则优先级即序号的顺序进行逐次判别,判断过程如图4.7所示。图4.7规则推理判断方法由规则Ⅰ开始依次判定,若满足规则,则执行相应结论,选择对应的量化因子和比例因子,若不满足则继续判定,直到满足为止。因此规则的编写一定要考虑到条件的完备性。否则会导致程序陷入死机状态,控制系统控制作用失效。5仿真结果及分析未加专家系统时,常规模糊控制仿真结果如图5.1所示,达到稳态后仍有小幅振动,超调量也较大。图5.1模糊控制的仿真响应曲线图5.2专家模糊控制的仿真响应曲线加入专家系统后,构成EFC系统后的仿真结果如图5.2所示,达到稳态后系统周期性波动消失,超调量相对减少,大大提高了系统对罐车清洗液PH值控制的精度和效率。6结论本系统综合了模糊控制和专家系统二者的优点,即具备灵活的推专家模糊控制在碱性清洗液pH值控制系统中的应用。更多资料请访问:
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码

 hyjddd
hyjddd
本文标题:专家模糊控制在碱性清洗液pH值控制系统中的应用
链接地址:https://www.777doc.com/doc-2813676 .html