您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 广告经营 > 2016毕业论文南阳
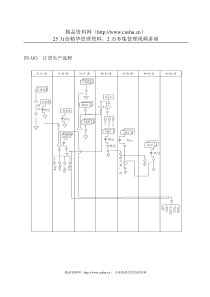
2016南阳理工学院电子与电气工程学院专电子信息工程学完成日期基于ARM的四旋翼自主飞行控制系统设计AutonomouscontrolsystemforthequadrotorunmannedaerialvehiclebasedonARMprocessors25页表0个插图20幅3南阳理工学院本科毕业设基于ARM的四旋翼自主飞行控制系统设计AutonomouscontrolsystemforthequadrotorunmannedaerialvehiclebasedonARMprocessors学电子与电气工程学院专电子信息工程学生姓学指导教评阅教完成日南阳理工学院NanyangInstituteofTechnology4基于ARM的四旋翼自主飞行控制系统设计[摘要]设计了一种基于嵌入式ARM的飞行控制系统的设计和实现方案。这是一种基于ARM的低成本、高性能的嵌入式微小无人机飞行控制系统的整体方案。详细介绍了控制系统飞行模态的控制要求。[关键词]ARMAutonomouscontrolsystemforthequadrotorunmannedaerialvehiclebasedonARMprocessorsAbstractInordertochangetheconventionalcontroloffour—rotorunmannedaerialvehiclesusingmicrocontrollerastheprocessorasolutionofflightcontrolsystembasedonembeddedARMwaspresentedwhichislow-cost,smallvolume,lowpowerconsumptionandhighperformance.ThepurposeoftheworkisforattendingtheNationalAerialRoboticsCompetition.ThemainfunctionofthesystemthehardwarestructureandthesoftwaredesignwerediscussedindetailincludingthesensormodulethemotormodulethewirelesscommunicationmoduleWithembeddedrealtimeoperatingsystemtoensurethesystem’shighreliabilityandreal-timeperformancetheexperimentsresultsshowthattherequirementsofflightmodearesatisfiedincludingtakingofhoveringandlandingandsoonKeywordsARMfour-rotorunmannedaerialvehiclescontrolsystem5ofthecontrolsignals1四旋翼飞行器的简介1.1题目综述MicroAirVehicle/MAVDARPAMAV35最大质量在3001080千米/行高度可达300米。MAV是充分利用微机电、微电子、智能控制和通讯等高科技的微生化战、侦察与此具有广泛的科学研究价值及民用价值。微型飞行器有一段漫长而又断断续续的历史。最早的四旋翼飞机可以追溯到1907Louis和JacquesBreguet等人研制出的“Gyroplane”便已经成功携带飞行员飞了1.5m的高度。1922年美国军方资助GeorgedeBothezat费用高昂和当时固定翼飞机的流行使得该项目最终搁浅。最成功的四旋翼飞机是1956年由covertawing公司资助D.H.kaplar研制出的‘H’20世纪80年MEMSMIMU的机吸引了大批研究人员和学者的关注。算和处理速度慢等问题。本研究硬件开发平台使用32位的ARM使用MEMS本文以实现基于ARMARM的MAV自主控制系统和硬件实现进行了深入的学习和研究。1.2国内外研究状况广阔的应用前景。基于ARM的四旋翼自主飞行器也得到了迅速发展。和传统的直升机相比,它有着自身的优势:当前后两个旋翼逆时针旋转,而左右两侧的旋翼顺时针旋转时,则尾桨控制和旋翼倾斜问题可以被忽略。6飞行、基于视觉系统的自主飞行和自主飞行器系统。典型代表有瑞士洛桑联邦科技学院的OS4、澳大利亚国立大学的X4、宾夕法尼亚大学的HMX4、佐治亚理工大学的GTMARS、斯坦福的‘Mesicopter’等他们对翼展20cm的微型无人机概念进行研究。从2000年底开始,法国武器装备部将3040cm2005的研制要求在设备的小型化、推进技术和2013年底该机可投入使用。究主要集中在几所高校之中。例如国防科技大学、南京航空航天大学、西北工业大学、北京科技大学和哈尔滨工业大学等等。大多数的研究方式DI/QFT态逆/ADRCPID控制、H1.3本文研究的主要内容的自主飞控制系计了全新的自主飞行控制系统。硬件开发平台使用ARM用MEMSDSP最小系统的设计步骤和电路抗干扰的措施。软件行介绍。高飞行控制硬件系统的稳定性和抗干扰性。在ARMLinux操作7MAV括机载计算机和MEMS传感器等。基于ARM括ARMUART、SPI、JTAG等接口电路的PWM感器的使用、A/D几年的大学学习使得我掌握ARM单片机的基本知识和编写ARMLinux环境下的设备2控制系统工作原理和结构框图2.1四旋翼自主飞行器的工作原理四旋翼直升机有46x、y、z()。四旋翼直升机通过调节对角线上旋翼的转速来改变姿态。四旋翼飞行器上下的垂直运动是通过4个旋翼同时4水平面内的前后运动是在旋翼1、23、4翼1、32413通过组翼飞行器飞行原理如图1所示图1四旋翼飞行器飞行原理示意图四旋翼直升机独特的机械结构决定了它可以通过只改变旋翼转速的方法来实现俯8转力矩必须保持恒定。(l)垂直升降与悬停:;实现悬停。垂直升降与悬停的控制方式如图2所示:图2垂直升降与悬停原理图(2)横向飞行与俯仰运动:减机3所示:图3横向飞行与俯仰运动原理图(3)水平旋转:9逆时针的水平旋转。水平旋转的控制方式如图4所示图4水平旋转的原理图4三个独立的通道(偏航、俯仰、横滚)PID而保证整个系统的稳定.姿态控制系统原理图如图5所示图5姿态控制系统原理图2.2四旋翼飞行器本体机架和平台是可行的。而且可以根据自身的条件和四旋翼飞行器功能的要求来选择合适10从而调整飞行器的姿态和位置。:具态飞行。这些优点决定了旋翼飞行器比固定翼无人机具有更广阔的应用前景。而在旋翼飞们的关注。飞行器本体如图6所示图6四旋翼飞行器本体图形3系统设计目标和设计方案3.1系统设计目标处理速度慢等问题。本研究硬件开发平台使用ARM11MEMS扰性。5300到360123453.2控制系统结构设计小型四旋翼飞行器控信息采集与检测、数据传输和系统控制等。3.2.1控制系统总体框架四旋翼飞行器的飞行控制系统通常由传感器测量装置、主控制器和驱动电机反馈回来的状态信息、预先给定的状态和现场无线输入的控制指令信息进行处制系统根据控制算法处理结果输出4路PWM力距来稳定飞行姿态。整个四旋翼飞行器控制系统主要分为机载控制部分和地面控制部分。机载部分系统结构框图如图7所示。S3C2440陀螺仪三轴加速度计数字罗盘无线通信模块电机驱动12图7机载部分系统结构框图需要RC接收机、MTi-G单元、ARM嵌入式控制器、AVR单片机以PC其中地面站PC翼飞行器自主控制系统如图8所示图8四旋翼飞行器自主控制系统原理图本系统的ARM嵌入式主控制器实现的1MTi-G23WIFI飞行器的状态信息。AVRAVRARM嵌入式控制器得出数字型的控制量后通过串口发送给AVRRCMTI-G电子调速器信号转换模块ARM嵌入式控制器AVR单片机地面站RC遥控器RC接收机地面部分机载部分包括手动自动切换通道M4M1M2M313接收机发出的PWMRC接收机的第7时的安全性。3.2.2硬件总体设计四旋翼自主软件出的PWM体状态数据给地面站。微型飞行器自主飞行控制硬件系统设计关键是针对MAV姿态稳MEMS传感器、分主要功能介绍如下。四旋翼飞行器硬件结构如图9所示供电供电供信息电信息信息信息机体平台图9四旋翼飞行器硬件结构图1还包括电机、减速齿轮和螺旋桨组成的推进组。2和数3统的重要组成部分。电源模块通讯模块推进组数据处理模块控制器传感器模块1445(或自动)完成数据63.2.3软件总体设计为所示的六个模块。图10四旋翼飞行器软件结构图图10四旋翼飞行器软件结构图123A/D采样的滤波、字符串与整形和浮点型之间的互换、数字罗盘的信息提取等等。4统控制所需的位姿信息。563.3硬件系统方案论证系统初始化模块传感器数据采集模块导航模块数据处理模块无线通信模块控制模块15采集数据。理能力强的处理器处理控制算法。3.3.1控制器芯片选型需要一个可靠性高、数据响应和处理的能力强的处理器。ARM处理器则能良好的应对这些控制要求。本文采用S3C2440ARM920T内核。ARM912、1.1MIPS/MHz3、支持32位的ARM指令集和16位的Thumb51ARM9芯片作为核心处理器。3.3.2传感器选型ENC-03M单轴角速度传感器和LIS344ALH三ENC-03M16ENC-03MENC-03MADXRS300BGA业人士焊接。LIS344ALH三轴加速度计是由意法半导体公司推出的低功耗、低成本的三轴模拟输MEMS传感器和一个CMOS接口LIS344ALH提供+-2g和+-6g10000g的撞击强度。MPS4115GPSUMR373.3.3A/D转换器选型A/D选型的标准有以下几点价格、功耗等。0-3V是0-5V。当前大多数芯片A/D输入信号范围基本都能满足要求。因此转换精度、转换速率是选型的主要考虑因素。转换速率指标设计目前大多数研究平台电机的控制频率为50Hz到100Hz制带宽只有50HzA/D的采样频率为控制频率的20倍2KHz。惯性元器件总共有6路A/D8路。因为A/D的转换芯片只有一个A/D8路转换就需要转换芯片至少1.6Mhz20%2Mhz。转换精度的指标设计A/DLSB1.5g800mV/g是2.4V。则对于12位A/D1个LSB对应的电压0.0458mVA/D转换17芯片的失调误差和增益误差之和最大为MLSB。根据以上分析可知最大误差电压达到M0.0458mV0.0458M/8009.8m/s23.13.20tVadtat(3.1)2012tsvdtat(3.2)因此速度误差V=0.0458M/8009.8tS=0.732M/8009.8tt/2。若假设1分钟的速度误差为1m/s则对应M=29。TMS320F28xDSC’s有一个16F28335的偏移误差为15LSB而30LSBDSP自带的12位A/DDSP的SPI口扩展以备更高精度的A/D芯片使用。3.3.4无线通信模块选型无线通信模块是四旋翼飞行器的重要组成部分。控制系统要求无线通讯误码率KYL-610RS-232、TTL、RS-485用单片射频集成电路及单片MCU1所示。表1KYL-610主要参数3.3.5驱动电机选型电源输出功率发射电流接受灵敏度外型尺寸3.1—5V=50mW20mA-108dBm(9600bps)40mm×24mm×6mm传输距离200m以上(BER=10-5@9600bps,标配10cm度1.5m)400m以上(BER=10-5@1200bps,标配10cm1.5m)18四旋翼飞行器一个非常重要的部件--效率高。有刷电机由代替电刷的转子位置检测器。A22120.0220.012KV值为1000rpm/VGWS1060HD的三叶螺旋桨。4控制系统硬件设计飞行控制系统的硬件部分是整个系PWM地面站。在上文中4.1电源模块硬件系统各部分对供DSP的核心电压需要1.8V/100MHz供电、IO需要3.3V5V3.3V5V11.1V供电。所以需要设计11.1V—5V—3.3V—1.8V的供电系统
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码

 夜天の风
夜天の风
本文标题:2016毕业论文南阳
链接地址:https://www.777doc.com/doc-2945927 .html