您好,欢迎访问三七文档
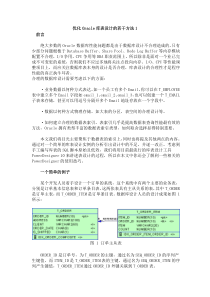
6.7全閉環模式當系統存在滑動、間隙與繞曲,使得馬達Encoder位置與機械位置不相等,此時利用光學尺、外部編碼器等,直接回授機械位置做為定位控制參考點,以達到高精度機械定位控制。機構示意圖如下:CN5光學尺或外部編碼器回授6.7.1Pt全閉環位置模式控制架構在Pt模式下,如果電子齒輪比設定為11,輸入1脈波信號,則追隨外部編碼器四倍頻後的1個脈波。如電子齒輪比設定為12,輸入1脈波信號,則追隨外部編碼器四倍頻後的2個脈波。電子齒輪位置比例增益P2-00誤差計數器速度迴路脈波信號馬達Encoder機構速度估測器外部編碼器低通濾波器P1-75馬達脈波計數器P1-72馬達一轉脈波數DI:0x00B全半閉環切換開關-+P1-84全閉環切換功能(設0,切換時清除誤差)+-P1-73光學尺與馬達間誤差過大保護+-CN5P1-74OA/OB/OZ輸出來源選擇檢出器輸出脈波數P1-46檢出器輸出極性P1-03OA/OB/OZDI:0x00E全閉環光學尺與馬達編碼器誤差清除誤差計數器第一分子(P1-44)第二分子(P2-60)第三分子(P2-61)第四分子(P2-62)分母(P1-45)GNUM0,GNUM16.7.2Pr全閉環位置模式控制架構Pr全閉環模式下,不管外部編碼器解析度,其Pr回授單位以1280000脈波/馬達1轉為單位。Pr脈波命令對應外部編碼器四倍頻脈波單位,請參考6.7.3.4電子齒輪比設定。6.7.3全閉環使用步驟在開啟全閉環功能前,請確認以下步驟,完成相關參數設定,再開啟全閉環功能。步驟內容相關參數1接線確認---2設定外部編碼器方向P1-743設定外部編碼器解析P1-724設定電子齒輪比P1-44,P1-455設定光學尺與馬達最大誤差量P1-736設定全、半閉切換時誤差清除功能P1-84位置比例增益P2-00誤差計數器速度迴路馬達Encoder機構速度估測器外部編碼器低通濾波器P1-75馬達脈波計數器P1-72馬達一轉脈波數DI:0x00B全半閉環切換開關-+P1-84全閉環切換功能(設0,切換時清除誤差)+-CN5內部Pr命令+-P1-74OA/OB/OZ輸出來源選擇檢出器輸出脈波數P1-46檢出器輸出極性P1-03P1-73光學尺與馬達間誤差過大保護DI:0x00E全閉環光學尺與馬達編碼器誤差清除誤差計數器OA/OB/OZ第一分子(P1-44)第二分子(P2-60)第三分子(P2-61)第四分子(P2-62)分母(P1-45)GNUM0,GNUM1馬達一轉脈波數P1-727設定DI:全、半閉切換DI光學尺與馬達編碼器誤差清除DIDI:0x0B0x0E8設定檢出器輸出脈波數P1-03,P1-469開啟全閉環功能P1-746.7.3.1接線確認CN5位置反饋信號接頭(全閉迴路)提供外部光學尺或編碼器(A,B,Z格式),連接伺服形成全閉環迴路。在位置模式,由上位機所下的脈衝位置命令便是參考外部的光學尺控制迴路架構。CN5連接器(母)PinNo信號名稱端子記號機能、說明1/Z相輸入Opt_/Z光學尺/Z相輸出2/B相輸入Opt_/B光學尺/B相輸出3B相輸入Opt_B光學尺B相輸出4A相輸入Opt_A光學尺A相輸出5/A相輸入Opt_/A光學尺/A相輸出6編碼器接地線GND接地7編碼器接地線GND接地8編碼器電源+5V光學尺+5V電源9Z相輸入Opt_Z光學尺Z相輸出6.7.3.2確認外部編碼器方向P1-74▲FCON光學尺全閉環功能控制開關通訊位址:0194H0195H光學尺回授正反相選擇0:光學尺A相領先B相為正方向1:光學尺B相領先A相為正方向如果不知道編碼器方向,則參考下列步驟。1.在非全閉環模式下,使用PC軟體,先將P1-72設定為800002.開啟示波器,將CH1與CH2分別選擇「回授位置[ENC.]」與「光學尺回授」。3.將伺服啟動,在安全不會撞機的前提下,利用JOG功能,低轉速讓馬達往一個方向移動,此時觀察回授位置與光學尺回授,如下圖:參考上圖,光學尺的脈波增加方向與馬達回授相反,此時利用P1-74的”光學尺回授正反相選擇”設定為1,把回授訊號反向後,兩個脈波的增加方向會一致如下圖6.7.3.3馬達一轉時,光學尺對應脈波量計算(P1-72參數計算方式)P1-72FRES光學尺全閉環的解析度通訊位址:0190H0191H初值:5000相關索引:-控制模式:Pt/Pr全閉環單位:pulse/rev設定範圍:4~80000資料大小:32bit顯示方式:DEC參數功能:馬達轉一圈時全閉環所對應的A/BPulse數(四倍頻之後)。假設機台使用螺桿傳動,則需差螺桿Pitch與光學尺解析度,以計算馬達一轉,光學尺脈波數。例一理論值(物理量推算):以一個Pitch為5mm,光學尺解析度為0.5um的應用,則可以計算出,馬達一轉時,光學尺回授論理上應為100005.05m[pulse]例二實際值(使用PC軟體示波器):如果系統傳動非螺桿或機構複雜難以計算,則非全閉環模式下,將伺服啟動,在安全不會撞機的前提下,利用JOG功能,低轉速讓馬達往一個方向移動,此時觀察馬達與光學尺回授,如上圖。利用示波器觀察數值差量的功能,量得在同一段時間內,馬達編碼器回授走了1575880個位移量,而光學尺回授走了12281個位移量,此時利用公式:10000|18685611280000*14607||1280000*|馬達編碼器回授位移量光學尺位移量波量馬達一回轉時光學尺脈,可以求得馬達一轉時,光學尺對應脈波量約等於10000。註:若螺桿類型的應用,實測後,實際與理論的“馬達一回轉時光學尺的脈波量”相近,則根據理論值設定P1-72若其他無法得知理論的“馬達一回轉時光學尺的脈波量”應用,則利用實際的“馬達一回轉時光學尺的脈波量”設定P1-726.7.3.4電子齒輪比設定Pt模式:f1:指令脈波,f2:位置指令[單位:光學尺脈波(四倍頻後)]例:如果電子齒輪比設定為11,代表輸入1脈波信號,則追隨外部編碼器四倍頻後的1個脈波。如果電子齒輪比設定為12,代表輸入1脈波信號,則追隨外部編碼器四倍頻後的2個脈波。Pr模式:在Pr模式下,回授解析以[1280000pulse/馬達1轉]為單位,範例:當馬達旋轉1圈,則外部編碼器產生2500個脈波設定P1-72=2500*4=10000Pr脈波命令對應外部編碼器四倍頻後脈波單位:451441PUUPP=外部編碼器四倍頻後脈波7211280000P假設希望Pr命令1脈波對應外部編碼器四倍頻後的1個脈波,則MN-+命令脈波1280000pulse/rev451441PUUPP=72112800001PPUU=1,則451441PP=128假設希望Pr命令1脈波對應外部編碼器四倍頻後的2個脈波,則451441PUUPP=72112800002PPUU=1,則451441PP=256P1-44▲GR1電子齒輪比分子(N1)通訊位址:0158H0159H初值:128相關索引:6.2.5節控制模式:Pt/Pr單位:pulse設定範圍:1~(229-1)資料大小:32bit顯示方式:DEC參數功能:多段電子齒輪比分子設定,請參考P2-60~P2-621)在Pt模式底下,在ServoOn下可以變更設定值。2)在Pr模式底下,必須在ServoOff下才可以變更設定值。P1-45GR2電子齒輪比分母(M)通訊位址:015AH015BH初值:10相關索引:6.3.6節控制模式:Pt/Pr單位:pulse設定範圍:1~(231-1)資料大小:32bit顯示方式:DEC參數功能:設定錯誤時伺服馬達易產生暴衝,故請依下列規定設定。指令脈波輸入比值設定指令脈波輸入比值範圍:1/50<Nx/M<256001)不論Pt/Pr模式底下,在ServoOn時均不可變更設定值。6.7.3.5設定光學尺與馬達最大誤差量當系統存在滑動、間隙與繞曲,使得馬達位置與機械位置產生誤差。當誤差過大,則代表連接器鬆脫或其他機構上問題發生,伺服產生異警40。P1-73FERR光學尺全閉環回授位置和馬達編碼器之間位置誤差過大的錯誤保護範圍通訊位址:0192H0193H初值:30000相關索引:P2-34控制模式:Pt/Pr全閉環單位:Pulse(以全閉環回授為基準)設定範圍:1~(231-1)資料大小:32bit顯示方式:DEC參數功能:當全閉環所回授的A/BCounter與伺服馬達本身的編碼器位置回授兩者之間的差異過大則代表可能連接器鬆脫或是其他機構上的問題發生。P1-75FELP全閉環位置檢測器與半閉環位置檢測器誤差低通濾波器時間常數通訊位址:0196H0197H初值:100相關索引:-控制模式:Pt/Pr單位:msec設定範圍:0~1000資料大小:16bit顯示方式:DEC參數功能:當全閉環與半閉環之間的傳動機構剛性不足的情況下,可以設定適當的時間常數可以提高系統的穩定性。也就是暫態時產生半閉環的效果,穩態之後又可以形成全閉環效果。當剛性足夠時則可以直接ByPass。設為0時關閉低通濾波功能(ByPass)。傳動機構剛性↑,P1-75↓傳動機構剛性↓,P1-75↑6.7.3.6設定全、半閉切換時誤差清除功能P1-84HFF半、全閉環切換時誤差清除功能通訊位址:01A8H01A9H初值:0相關索引:-控制模式:Pt/Pr全閉環單位:-設定範圍:0~1資料大小:16bit顯示方式:HEX參數功能:半閉環切全閉環誤差清除功能參數功能:0:DI設置為0x00B可提供全、半閉環切換。切換時,誤差會被清除。在半閉環下,命令將參考馬達Encoder,切回全閉環後,位置不會移動。1:DI設置為0x00B可提供全、半閉環切換。切換時,誤差不會被清除。在半閉環下,命令將參考馬達Encoder,切回全閉環後,在半閉環所下達的命令,將會變成全閉環的命令。(切回全閉環位置會移動)。馬達Encoder外部編碼器切換時,位置不變馬達Encoder外部編碼器Step1.全閉環馬達Encoder外部編碼器Step2.半閉環100100100100馬達Encoder外部編碼器Step3.半閉環120150命令增加40因機構存在滑動,所以馬達與外部編碼器增量不一樣Step4.全閉環切換回全閉環,位置不會移動目前位置切換回全閉環,位置不移動1201506.7.3.7設定相關DI數位輸入(DI)功能定義表設定值:0x0B符號數位輸入(DI)功能說明觸發方式控制模式FHS全、半閉環模式的切換準位Pt/Pr全閉環設定值:0x0E符號數位輸入(DI)功能說明觸發方式控制模式FEC全閉環光學尺與馬達編碼器誤差清除準位Pt/Pr全閉環馬達Encoder馬達Encoder馬達Encoder外部編碼器切換時,位置不變切換回全閉環,參考外部編碼器,會補償至命令40Step1.全閉環外部編碼器Step2.半閉環110100100110外部編碼器Step3.半閉環120150命令增加40因機構存在滑動,所以馬達與外部編碼器增量不一樣馬達Encoder外部編碼器Step4.全閉環140190切換回全閉環,位置會移動目前位置6.7.3.8設定檢出器輸出脈波數P1-74▲FCON光學尺全閉環功能控制開關通訊位址:0194H0195HOA/OB/OZ輸出來源選擇0:OA/OB/OZ輸出來源為馬達的編碼器。1:OA/OB/OZ輸出來源為光學尺全閉環的編碼器。韌體DSPV1.016+CPLD0.07(含以後)提供:2:OA/OB/OZ輸出來源為CN1的脈波命令P1-46▲GR3檢出器輸出脈波數設定通訊位址:015CH015DH初值:2500相關索引:-控制模式:ALL單位:pulse設定範圍:20~320000資料大小:32bit顯示方式:DEC參數功能:一回轉單相脈波數設定。設定範圍:20~320000。以下情況時,可能會超出驅動器最大可輸出脈波頻率,形成AL018:1.編碼器異常2.馬達轉速大於P1-76的設定3.P1-76AMSPD檢出器輸出(OA,OB)最
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 lgkx
lgkx
本文标题:台达伺服全闭环反馈
链接地址:https://www.777doc.com/doc-2959135 .html