您好,欢迎访问三七文档
当前位置:首页 > 行业资料 > 能源与动力工程 > 激光雷达在智能交通中的应用
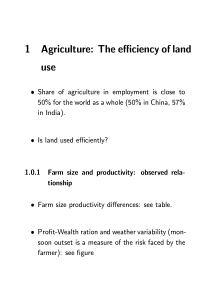
组长:关勇组员:姜福金、熊扬、林璇一、意义和目的二、激光雷达的应用三、总结是将先进的电子、信息、传感与检测、自动控制、系统工程等技术综合运用于地面交通,建立起安全、实时、准确、高效的地面运输系统;实质是利用高新技术改造传统运输系统而形成的一种信息化、自动化、智能化、社会化的新型运输系统其中,激光雷达技术在智能交通系统中发挥着不可或缺的作用。激光雷达可分为:单线激光雷达只发射一个激光束的雷达,它具有结构简单、功耗低、使用方便等优点,广泛应用于障碍物的检测,道路路边、路面的检测及跟踪等。多线激光雷达多线激光雷达是针对单线雷达的部分缺点设计的一种改良方案。它可以实现单线雷达的所有功能,当然导致了系统复杂度加大,数据处理难度增加等问题。它可以部分解决障碍物相互遮挡的问题,并且可以提供障碍物的高度,但是精度较差。三维全向激光雷达与单线激光雷达相比,三维全向激光雷达在可视范围和环境信息的丰富性、细节性上得到了极大的提高激光雷达具备独特的优点:极高的距离分辨率和角分辨率速度分率高测速范围广能获得目标的多种图像抗干扰能力强比微波雷达的体积和重量小等基于激光雷达的优点,激光雷达在智能交通中的发挥的作用主要有:精确测量目标位置(距离和角度)精确测量运动状态(速度、振动和姿态)和形状探测、识别、分辨和跟踪目标激光雷达技术可以用在先进的车辆控制与安全系AVCSS、汽车主动避撞系统等智能交通系统中的子系统,可以动态从路况、车况及驾驶员的综合信息中判断是否构成安全隐患并给与提示,在紧急情况下,能自动采取措施控制汽车,使汽车能主动避开危险,保证车辆安全行驶。定位导航障碍检测及运动目标跟踪在车辆检测与智能交通信号控制中的应用激光雷达的定位应用主要是在智能车上的运用,智能车所用的位置传感器有:里程计输出结果会随着运动距离的增加而出现越来越大的累积误差惯性导航惯导的输出有漂移,导致积分后的位置信息出现偏差GPS输出只有位置信息,而不包含重要的车辆朝向角信息在运动定位中,位置传感器是不可缺少的,它提供了智能车的大致的定位信息,在此基础上,激光雷达从环境中感知的信息用来在小范围内和已知地图匹配,实现对位置传感器定位的校正。如果没有位置传感器的辅助,仅靠外部环境传感器获得的大量不确定和不完全的信息实现智能车的大范围的位置估计就变得很困难。综上,激光雷达在定位中的最主要的作用就是对位置传感器定位的校正定位的具体的方法有:基于蒙特卡罗(MonteCarlo)的定位方法基于角度直方图的定位方法基于特征提取和匹配的定位方法基于蒙特卡罗的定位方法是一种基于概率的定位方法,需要建立起激光雷达传感器的概率模型。由于传感器概率模型的准确性直接影响到定位的结果,又由于传感器概率模型的获取比较复杂困难,因此这种方法具有一定的局限性。基于角度直方图的定位方法是匹配相邻两帧的激光雷达数据,比较两帧之间的位置偏移量和角度偏移量,从而得到智能车辆的位姿估计。这种做法要求运动环境中具有比较明显的线段特征,而且其精度由于与直方图的分辨率有关而十分有限。基于特征提取和匹配的定位方法是根据激光雷达数据的特点,利用点和线段特征来描述环境;提取出当前时刻的点或线段特征,与已知地图进行匹配,从而得到车辆的位姿估计。这种方法需要建立环境的地图,并在已知地图的基础上进行定位,因此这种方法也可以称为基于地图的定位方法。该方法关键问题是对环境地图的描述和地图自动生成问题、环境地图的匹配问题、以及定位的精度问题。其中,环境地图可以是由一些有标志性的位置点所组成二维图形障碍检测及运动目标跟踪是激光雷达在智能交通中最主要的一个运用,主要是自主车(即无人驾驶)。在自主车系统中,实现障碍物的检测常用的传感器有双目立体相机、激光雷达等。相比于双目立体相机,激光雷达在深度信息的准确性以及检测范围上要更为出色。障碍检测算法利用了检测区域的坡度信息进行障碍检测,包括3个步骤:1、候选障碍点的提取2、干扰点的滤除3、障碍点的聚类障碍检测及运动目标跟踪在障碍的检测过程中,由于车体的颠簸、障碍的遮挡及雷达自身盲区等原因,障碍位置的测量数据存在较大误差,因此需要对障碍目标进行滤波与跟踪,以获取稳定准确的障碍信息。障碍检测及运动目标跟踪在障碍的跟踪过程中,按以下原则进行障碍检测:1)利用跟踪门技术对目标物体进行身份识别与验证.2)当障碍第一次出现时,对其进行跟踪,如果它持续出现几帧,就认为它是障碍目标,否则将其视为干扰进行滤除.3)如果障碍在运行过程中突然消失,则它可能进入雷达盲区或被遮挡,应继续对其进行跟踪,直到它重新出现或者预测到其消失在雷达的视场范围之外.在车辆检测与智能交通信号控制中的应用在城市重要交通路口的信号控制系统中集成一个地面三维激光扫描系统,通过地面三维激光扫描仪对道路一定距离(如300m道路长度)进行连续扫描,可以获得道路上的实时、动态的车流量点云数据,通过对原始车流量点云数据进行去噪、平滑、分割及滤波等操作,接着进行高程的重建和数据内插,从而可以得到高精度的车流DEM数据,利用这些车流DEM数据可以获取道路车辆到达信息(车流量、道路占有率、排队长度)等参数),并与其他检测设备联机处理形成控制方案,从而连续实时调整周期、绿信比和相位差以适应不同的交通流。在车辆检测与智能交通信号控制中的应用根据获取的道路车流点云数据量的大小、高程值和道路占有率可以计算出道路上的车流量信息,根据对东西向和南北向车流量大小的比较以及短暂车流量预测,从而自动调节东西向和南北向信号灯周期,在车辆检测与智能交通信号控制中的应用将地面三维激光扫描系统应用到信号控制系统中,并不是取代视频监控,而是弥补视频检测和监控的不足,使智能交通信号控制系统能够获取实时的交通模型和车流实时信息反馈,并检测车辆排队长度,预测短暂未来交通流趋势,从而实时调整周期、绿信比和相位差以适应不同的交通流,减少拥堵,降低延误,提高道路通行能力。在车辆检测与智能交通信号控制中的应用总结1、在智能交通中激光雷达技术主要在自主车中的运用,然而,自主车目前只限于部分高校进行研制,还没有真正推广到大众。2、Lidar应用智能交通系统规划和设计时,有时没有从系统需求出发,误以为利用信息化技术就可以解决一切问题。应该考虑实际问题,同样,也面临着由于信息过剩所带来的一系列问题。3、lidar应用智能交通在中国的发展尚不完善,未来还有众多领域有待于开发,市场前景广阔,在较长一段时间内都将继续呈现高速增长的态势。公路、水运、航运、轨道交通等网络的高效运行,都需要其相关功能的系统进行支持。总结THANKSQ&A
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码





 binkin2627
binkin2627
本文标题:激光雷达在智能交通中的应用
链接地址:https://www.777doc.com/doc-3155770 .html