您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 管理学资料 > 3-3 线性系统的时域分析-3(4,5)
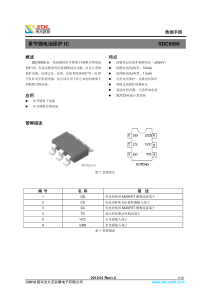
chpt31§3-4高阶系统的时域分析chpt32一、三阶系统的单位阶跃响应设闭环传递函数式中,s0>0,ζ<1当输入为单位阶跃函数时,)2)(()()()(22002nnnssssssRsCs220111)(nnnnjsCjsBssAssCchpt33取拉氏反变换,(且令b=s0/ζωn,)并整理得由于表明(1)实数极点s=s0可使单位阶跃响应的超调量下降,并使调节时间增加。(2)当系统阻尼比ζ不变时,随着b值的下降,超调量不断下降、而峰值时间、上升时间、和调节时间则不断加长。在b<1时,三阶系统将表现出明显的过阻尼特性。]1sin1)1)2((1cos)2([1)2(1)2(11)(22222220tbbtbbbbeebbthnnttsn0)1()1(1)2(2222bbbchpt34(图3-27三阶系统的单位阶跃响应曲线ζ=0.5)chpt35二、高阶系统的单位阶跃响应(图3-28控制系统)其闭环传递函数式中,K=b0/a0;zi为M(s)=0的根,称为闭环零点;si为D(s)=0的根,称为闭环极点。niimiinnnnmmmmsszsKasasasabsbsbsbsDsMsHsGsGsRsCs1111101110)()()()()()(1)()()()(chpt36当输入为单位阶跃函数时,式中,q+2r=n,q为实数极点的个数;r为共轭复数极点的对数。部分分式展开,并设0<ζk<1,取拉氏反变换,并整理得表明(1)响应由一阶系统和二阶系统的时间响应函数项组成。当所有闭环极点都位于左半s开平面时,系统是稳定的。(2)零极点对系统性能的影响。qjrkkkkkkjjrkkkkqjjmiissCsBssAsAssssszsKsC112201221121)2()()()(0,)1sin(1)1cos()(2121210tteBCteBeAAthkktrkkkkkkkrkkktkqjtsjkkkkjchpt37chpt38三、闭环主导极点闭环主导极点:在所有的闭环极点中,距虚轴最近、周围没有闭环零点、而又远离其它闭环极点的极点。它所对应的响应分量在系统的响应过程中起主导作用。高阶系统的增益常常调整到使系统具有一对闭环共轭主导极点,这时可以用二阶系统的动态性能指标来估算高阶系统的动态性能。设单位反馈高阶系统具有一对共轭复数闭环主导极点:系统单位阶跃响应的近似表达式:上式中的振幅与相位已经考虑了闭环零点与非主导极点对响应过程的影响。10,2,1djs0,)()(cos)()(21)(11)()(11)()(11)()()(1111112121tsDssMtesDssMtcssssDsMssssDsMsssNsMsCdtsssschpt39四、高阶系统的动态性能估算(非主导极点实部的模比主导极点实部的模大三倍以上)1、峰值时间的计算令h´(t)=0,得结论:(1)闭环零点越接近虚轴,峰值时间越小,系统响应速度越快;(2)闭环非主导极点的作用是增大峰值时间,使系统响应速度变缓;(3)若闭环零、极点彼此接近,则它们对系统响应速度的影响相互削弱;(4)若系统不存在闭环零点和非主导极点,则tp=π/ωd。niimiidpsszst3111)()(1chpt3102、超调量的计算结论:(1)闭环零点会减小系统阻尼。(2)闭环非主导极点会增大系统阻尼。(3)若系统不存在闭环零点和非主导极点,则%100%111313ptmiimiiniiniiezzssss%100%21/echpt3113、调节时间的计算结论:(1)闭环零点越接近虚轴,峰值时间越小,超调量和调节时间越大;(2)闭环非主导极点的作用是增大峰值时间,但可减小系统的超调量和调节时间。miimiiniiniinszzsssst1112122ln1chpt312§3-5线性系统的稳定性分析chpt313一、稳定性的基本概念稳定性:系统在扰动消失后,由初始偏差状态恢复到原平衡状态的性能。(图3-29单摆)大范围稳定的系统:扰动引起的大初始偏差下稳定。小范围稳定的系统:(非线性系统)平衡状态稳定性与运动稳定性线性控制系统的稳定性:动态过程随时间的推移逐渐衰减并趋于零(原平衡点)。渐近稳定chpt314二、线性系统稳定的充分必要条件以脉冲响应为例:即输出增量收敛于原平衡工作点,则线性系统是稳定的。0)(limtctchpt315闭环系统特征方程的所有根均有负实部;或闭环传递函数的极点均严格位于左半s平面12211()()()(2)miiqrjkkkjkKszCSssss22,cos(1),sin(1)jkkkkstkkkkeee其运动模态为:充分必要条件为:输出量:chpt316三、劳思-赫尔维茨稳定判据(1877、1895)1、赫尔维茨稳定判据线性系统稳定的必要条件:线性系统特征方程的各项系数为正数。3121,1,,100010,,........,(1)nnniijijiijijkijijknnniiaaasssssaaaasa101()....0nnnDSasasa特征方程:chpt317线性系统稳定的充分且必要条件:由系统特征方程各项系数所构成的主行列式Δn及其顺序主子式Δi(i=1,2,…,n-1)全部为正。13502413021......00......000.......0000.......00........nnaaaaaaaaaaaan1311202,0,......aaaaachpt318当n=3时,即特征方程的各项系数为正,且a1a2-a0a3>0;当n=4时,即特征方程的各项系数为正,且Δ2=a1a2-a0a3>0,以及Δ2>a1²a4/a3。李纳德-戚帕特稳定判据:可以减少一半计算工作量。例如:当n=2时,即特征方程的各项系数为正;chpt319例3-7chpt3202、劳思稳定判据:劳思表中第一列各值为正。chpt321与赫尔维茨行列式的关系:a1=Δ1,c13=Δ2/Δ1,c14=Δ3/Δ2,c15=Δ4/Δ3,…,c1,n=Δn-1/Δn-2,c1,n+1=Δn/Δn-1高阶系统特征方程:采用递推劳思表。递推公式:,,6,4,2;1,,2,1112010jniaaaaaijiijijiiichpt322chpt323四、劳思稳定判据的特殊情况1、劳思表中某行的第一列项为零,而其余各项不为零,或不全为零chpt3242、劳思表中出现全零行以全零行上面一行的系数构造一个辅助方程:F(s)=0,并对之求导,用所得导数方程的系数取代全零行的元,继续运算。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 stella雅然
stella雅然
本文标题:3-3 线性系统的时域分析-3(4,5)
链接地址:https://www.777doc.com/doc-3205719 .html