您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 人事档案/员工关系 > 井下人员定位系统的研究
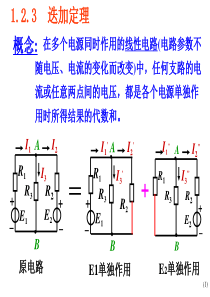
西安工程大学硕士学位论文答辩作者:邓凯伦导师:徐进学院:电信学院井下人员定位系统的研究绪论我国依然处于世界最大的发展中国家,每天作用煤炭数量是惊人的,而井下矿难时由于未得到及时有效的救援而罹难的矿工数量一直居高不下。根据国家监管局发布的有关消息,2002—2009年我国死于矿难的井下工人人数高达41064人,同一时期美国却仅有277人丧生(我国死亡人数的148分之一)。近六年中国矿难死亡人数趋于降低,但每年依然有成百上千人死于矿难,所以,我国的矿难营救任务是严峻又急切的。随着世界整体科技的不断进步,近些年人员定位系统的课题被广泛研究,不同的科技领域同时碰撞,现已有多种不同领域技术的相关人员定位系统的研究。例如:无线人员定位系统(WIFI、RFID、ZIGBEE技术等)、红外成像技术、声纳系统、超低频电磁波技术等等。但每种技术在井下人员定位的应用中均存在局限性。如何充分利用各种技术的优势,并利用多种技术的融合来弥补各技术上的缺陷,是当今国内外主要研究方向。主要研究内容1、基于RFID射频技术的井下人员定位系统2、基于红外成像技术的井下人员定位系统3、基于超低频电磁波技术的井下人员定位系统4、三种技术相互融合,建立一套完善的井下人员定位系统,从而解决井下救援行动中所能遇到的各种突发事故,真正有效快速准确的找到被困人员位置,为进一步开展救援行动提供宝贵时间。第一章RFID井下人员定位系统的研究1、射频识别系统的介绍2、用RFID实现井下人员定位设计3、系统硬件架构设计与实现射频识别系统的介绍电源时钟读写模块射频模块天线数据输入数据输出通信网络天线射频模块存储器控制模块电子标签能量时钟数据输入数据输出能量、时钟数据输入数据输出图1射频系统结构图射频识别系统的介绍数据调制阅读器部分稳压数据调节数据调制EEPROM整流标签部分U0控制逻辑数据调节图2RFID工作原理图射频识别系统的介绍表1不同频段RFID工作参数对比射频识别系统的介绍用RFID实现井下人员定位设计监控计算机采集器a(数传接口)采集器b(数传接口)采集器1(数传接口)光纤光纤井上网络井下网络CANBUSCANBUS分站1分站X标签巷道1分站M分站N标签巷道X图3井下RFID人员定位系统用RFID实现井下人员定位设计监控画面实际现场井下基站井下人员图3井上监控中心直观示意图用RFID实现井下人员定位设计服务器监控计算机UPS电源数传接口井下传输总线HUB网络终端网络终端光纤图5井上局域网的架构系统硬件架构设计与实现通过前面对RFID技术的分析,根据井下作业具体环境的考虑,提出以下设计要求:·工作频率:微波段;·天线结构:小型,辐射性能:全向;·标签结构:小型,天线集成化,供电形式:自带电源;·阅读器结构:小型,装于井下巷道壁上;·识别范围10米以上;系统硬件架构设计与实现RS232/RS485转换电路地面监控pcLCD模块电源模块单片机主控模块ISP下载模块RF模块阅读器阅读器天线标签天线标签RF模块单片机主控模块锂电池EEPROM地上井下图6RFID系统的硬件框图AT89S512.4GH频段MCU模块:收发模块:RFW302芯片组CC2420NRF2401T6963C的液晶驱动控制器该模块为240*64点阵。T6963C具有自动进行功能,可以自动处理液晶屏的显示驱动、点阵扫描、显示存储器管理等操作NRF24E1NRF905第二章红外成像井下人员定位技术1、红外成像特点及其图像处理的算法2、井下便携式红外人员定位系统的设计分析红外成像特点及其图像处理的算法物体红外辐射大气传输光学成像红外探测电子处理显示成像图7红外图像的成像过程下图展示的是红外图像形成的大致流程,由于任何高于零点温度的物体均可向外放射红外辐射,当物体向外放射的红外辐射通过空气传输后,被红外探测系统所捕获,紧接着辐射信号通过光学组件成像后进入红外探测器,随即再进行一些列的信号转换与处理。并通过探测器输出出去。输出出去的原始电信号数据进一步进行相关的红外图像处理,就能得到可以在显示屏显示的数据,通过显示模块显示出来。能够影响红外成像质量的因素有:目标的能量辐射强度、目标辐射与红外接收器的距离、大气传输过程、系统内部的光电转换过程、光学成像等,他们都能导致最终的红外成像具有对比度低、信噪比低、响应非均匀性差等缺点。因此对红外图像进行预处理是能够提高图像质量的方式,其方式主要分为非均匀性校正、盲元补偿和图像增强。红外成像特点及其图像处理的算法1、校正红外成像的非均匀性的算法有好多种,主要可以分为两种算法方式:按参考辐射源定标的方法、以场景统计为依据的校正方法。此种方式会随着运行时间增加而失效,导致红外成像的非均匀性反复出现发展水平依然处于研究阶段,还不具备在市场上应用的条件综上所述,为了改善两点校正算法自身的缺陷(响应时间漂移带来的参数失效),本文还设计了一种新型的两点校正补偿的算法。()VTHI()iHIT()iLITLI0LTHTT图8两点校正响应映射图()()()()()()HLHLLLIIGiIiIiOiIGiIi111()MNLLijIIiMN111()MNHHijIIiMN()()()()newTiGiTiOi红外成像特点及其图像处理的算法原始图像校正后的图像图9红外原始图像校正前后的对比2、盲元检测和补偿图10盲元补偿前后效果图红外成像特点及其图像处理的算法3、红外成像系统的图像增强原始图现在没有经过处理前,原始数值会集中在狭窄的灰度区间内,导致图像质量不高,只有经过图像增强处理后的红外图像才能适合人眼的分辨和对目标物体的定位查询。图11红外图像增强前后的对比图井下红外定位系统中采用的图像增强方式是线性灰度拉伸方法。红外成像特点及其图像处理的算法0SmaxSminrkmaxrr图12改进型灰度线性拉伸法min()newIkIrmaxmaxminSkrrmaxmaxminmaxminmaxminnewSSIIrrrrr两个图像拉伸参数S、Offset为:maxmaxminSSrrmaxminmaxminSrOffsetrr井下红外人员定位系统的设计分析温度控制模块A/D转换偏置电压模块温度控制模块A/D转换偏置电压模块红外探测器驱动板FPGA板ARM板LASERARM11LCD显示模块DcinPALSDUSBRS232KEYPAD接口板图13系统框架图第三章主动电磁波井下人员定位技术1、主动式雷达探测系统的基本原理2、连续波雷达生命探测系统设计主动式雷达探测系统的基本原理主动式生命探测系统又称雷达探测系统,其实就是生命呼吸和运动的探测器,系统主动连续发射电磁信号,对工作区域进行“扫描”,同时系统不断接收反射信号,并对这些反射信号中寻找是否存在生命信号的信息。当发现此类信号后,再对其进行滤波提取,经过放大把此类波谱信息通过PC机或嵌入式系统进行分析与算法处理,最后在显示屏上显示检测结果信息。雷达探测的基本原理是利用物体运动时产生的多普勒效应。多普勒雷达超宽带雷达连续波雷达发射机接收机收发控制信号处理机计算机天线图14系统原理图主动式雷达探测系统的基本原理连续波雷达发射的信号为:)2cos()(tfAtsc由目标反射的回波信号为:])(2cos[)()(rcrrttfKAttKsts当目标与雷达之间距离匀速随时间变化时,则在t时刻两者之间的距离为:tvRtRr0)(由于电磁波的速度c比雷达和目标间的相对速度rv很多,故时延rt表示为:)(2)(20tvRcctRtrr回波信号与发射信号进行对比,高频相位差为:)(22)(2200tvRtvRcfrrc该式速度rv为常数时产生频率差为:rdvdtdf221该式为多普勒频率。连续波雷达生命探测系统设计人体心跳呼吸影响胸腔起伏运动,人体的生命信号特征有:(1)生命信号具有非正弦性。(2)生命信号具有平稳特征。心跳和呼吸频率呈周期性的变化。(3)采用不同频率发射雷达时,所得到生命信号的频率变化范围不同。对于最佳探测频率,人的生命信号频率变化范围为0.1-3Hz。(4)人体生命信号的探测就是低速运动目标的检测。(5)生命信号的径向运动方向是周期往复变化的,这样使目标与雷达造成的平均距离近似恒值。(6)多普勒频率接近零,同时外界物体所产生的多普勒频率与其接近。雷达生命探测系统对障碍物背后的目标进行探测时,特点为:1、固定物体(岩石、障碍物、墙壁)对雷达波的反射能力强,生命体呼吸心跳产生的微动形成的反射回波经过外界因素而变得很弱。2、探测器会在工作过程中接收到很多不必要的低频振动误差干扰,如操作员的心跳、身体抖动,外界移动物体,水滴,坠物等的影响。3、井下环境复杂多变,温度、湿度、气体成分等不同的恶劣条件均会不同程度影响探测器的工作质量。根据井下应用的工作环境,结合上述分析,本文的井下人员定位系统设计总体要求如下:1.增强干扰抑制模块,减少直达波的干扰。2.增强信号处理模块,增强生命信号的提取。3.增强电源控制模块,增强对外界环境的适应性。连续波雷达生命探测系统设计电源控制控制模块振荡源定向耦合环形器收发隔离主天线收发隔离辅助天线电调移相电调放大单片机控制检波器后端PDA定向耦合器信号处理本文提出了双天线抑制法与回波对消法相结合的系统模式。并通过改进电源模块和探测方式进一步的提高本套系统的先进性。图15井下雷达人员定位系统框图连续波雷达生命探测系统设计频率源100MHz频率合成耦合功率放大环形器合路前放滤波耦合微波检测混频低通中放解调单片机电调移相电调放大回波对消电路IQ信号图16收发模块系统框图连续波雷达生命探测系统设计所谓对消,就是利用一个大小相同,方向相反的波形与目标波形进行结合来抵消原本的波形的过程。本文在研究中,可以利用一个矢量来描述原连续波的波形,通过产生一个方向相反的矢量进行对消,就能解决本文中的回波对消任务。电调移相电调放大单片机控制检波器图17回波对消设计结构图连续波雷达生命探测系统设计主天线采集到的信号中,包含了从目标物体反射回来的回波,也存在外界环境导致的干扰波(期望信号)。而由于辅助天线无法穿透墙壁探测目标信号,所以采集到的信号均是干扰信号(参考信号)。通过相关的信号处理算法,我们可以根据参考信号将期望信号中的干扰杂波抵消,从而起到消杂的功能。主天线辅助天线预处理器预处理器A/DPDA图18双天线模块结构框图第四章三种井下人员定位系统地融合与应用1、RFID井下人员定位系统的优缺点分析2、井下红外成像探测系统的优缺点分析3、井下雷达探测系统的优缺点分析4、新型井下人员定位系统RFID井下人员定位系统的优缺点分析1、RFID阅读器与标签对特殊环境具有很强抵抗性。2、标签轻便灵巧,适合井下人员的随身携带;3、RFID技术的识别率更高,更加精准,距离更可控;4、RFID所具备的穿透性,可以做到无屏障阅读;5、安全性能高,不易泄露;6、RFID芯片数据容量很大。1、超高频RFID标签具有反向反射特点,在金属、液体物体中难以工作;2、价格成本高;3、RFID井下定位需依托安装在不同巷壁上的阅读器和天线,一旦发生井下突发事故很容易损坏设备,不能对事故发生后有效的起到作用;4、国内RFID技术标准不一,不同RFID标签互不兼容;井下红外成像探测系统的优缺点分析1、被动式的无线的检测与识别技术,适合开展搜救搜索工作;2、红外成像技术不受电磁干扰。探测距离远、目标精确,并可同时跟踪多个生命源;3、红外辐射是最为普遍的辐射,可以在完全恶劣环境下能够清晰地观察到所需追踪的目标;4、红外成像技术探测距离远;1、当被搜物体与周围环境温度不大或近似相近时,红外图像对比度低,分辨细节能力差;2、井下红外探测系统无法穿越墙壁、阻挡物、玻璃等物体,无法定位障碍物背后的生命目标;3、红外成像系统的成本高,不利于其广泛的应用。井下雷达探测系统的优缺点分析1、雷达生命探测仪可以穿透事故发生后的各种障碍物;2、便携式携带,使搜救小组的营救行
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码







 tailer888
tailer888
本文标题:井下人员定位系统的研究
链接地址:https://www.777doc.com/doc-3249862 .html