您好,欢迎访问三七文档
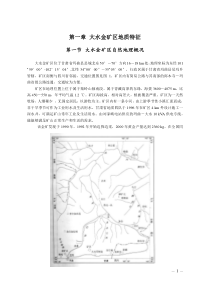
1郭孔辉雷雨成2004年6月汽车悬架设计理论与相关技术21、车轮定位2、悬架的运动学、车身的侧倾与纵倾3、轮荷转移4、侧倾转向5、侧向力转向6、纵向力转向7、轮胎特性与稳态转向特性8、汽车操纵的瞬态响应目录3kdkx(外张)gyF(外向)ggzMkxD1.1.车轮定位参数车轮前束toe车轮外倾主销后倾主销内倾主销纵偏距主销侧偏距主销拖距轴距l轮距B主销地面侧偏距kbg1、车轮定位kxDxyDkkyDryFkbgkxr41.2、车轮外倾与轮胎侧倾特性外倾因载荷、制动与跳动而改变轮胎侧倾特性:侧向力与反回正力矩外倾原因:“传统”,间隙,弹性,路拱1.3、前束与轮胎侧偏特性前束原因:平衡外倾载荷变化与车轮跳动时前束的变化干涉转向干涉转向的合理值滚动阻力要求适当增大前束,制动时车轮前张()0r5主销拖距高速回正原理载荷变化(制动)与车轮跳动的变化主销拖距与撒手稳定性与前轮摆振xkktanRD+=x1.5、主销内倾与侧偏距低速回正性作用的消失重力弹簧回正力距与还是成比例?计算方法121yyGRgVGgaF==kkxkxrxyDk1.4、主销后倾与纵偏距kyDryFkbg6高速回正原理定位参数必须足以克服干摩擦(残余横摆角速度与转向盘转角)转向逆效率要低吗?NO减小转向系干磨擦,减小定位角,加转向阻尼器是近代趋势减小(地面主销侧偏距)的意义和“负偏距”的优点盘式制动的必要性-地面负偏移距趋势小的主销后倾角,大的内倾角r1.6、主销定位参数的选择与近代趋势72.1车身稳态位移的一般分析•车身受有三种力(达朗贝尔概念)1.重心处的重力与惯性力2.导向杆系的导向力3.弹性元件的弹簧力gMMg3NP2P11N2NMgMgNyeN1N22、悬架的运动学8•等效系统,将弹簧力简化到车轮接地点(杠杆比为1)处,目的:━便于确定有效导向力的方向与大小━初始弹簧力与重力抵消━便于由弹簧变形和轮距(轴距)来确定车身位移MgMgNye9•弹簧力的确定三种力相平衡弹簧力必等于惯性力与导向力的总和对于等效系统确定了导向力就等于确定了弹簧力确定了弹簧力就等于确定了车身倾角(如果有横向稳定杆要考虑之)•导向力的分解与“力矩中心”导向力合力未必水平在“中性面”处分解的意义:车身的垂向平动与转动S2S2MgMgNyeS1S1N2N110•“纵倾中性面”的确定•车身位移其中:Lkkka2121+==CMki/NZz=e.mge.MgM+=222111bKaKC+=中性面MgMghNZNN1K2K1a2a112.2、车身侧倾通常对称面就是中性面由单侧导向力方向可确定(整车)外加轮胎变形若有横向稳定杆要考虑之或设计之1Mge/CMgeCeyM0yey0yy0yy==0yeMgMgNyeS1S1N2N1S2S2c悬上质心0yeh2h1ab1c2c12大侧倾角下力矩中心的变化Z2N2S2Z1S1N1NN2cyeMgN1132.3、侧倾性能小结yy0yy0yyMgeCeyM=yC=)(B.2k)(B.2ky2e2eeC独立悬架非独立悬架ye降低的途径:降低重心,提高侧倾力矩中心提高侧倾力矩中心的限制ye取决于与sBeBsBeB142.4、其它导向机构(侧倾)━等效单横臂概念“郭孔辉刚化定理”cYZP对称面双横臂15对称面cYZP麦弗逊悬架侧倾中心16斜置单臂俯视(等效)YZr俯视yUxU侧视(等效)YZrXZr后视xUYZrXZryU17复合式悬架侧倾中心如果扭杆梁靠近前铰点独立性好,但侧倾中心低18非独立悬架侧倾中心192.5、车身纵倾中性面N1N1N2X2X2Z2N2N1Z1X2xe212kkk+xxxxMgeCe.xM=N202.6、其它导向机构━郭孔辉等效纵臂理论xUxZPxUxZP212.7、钣簧的导向作用侧向反力作用线取决于吊耳、卷耳的刚性与弧高一般在卷耳平均高度点与第一片中点之间,更靠近卷耳高度,作为横向侧倾中心纵向等效单臂,由车轮接地点运动学确定。Nye2rh=L43=r22侧倾轴的倾角━前低后高是因为前面是双横臂后面非独立━尽可能提高侧倾中心232.8、结构比较与案例分析独立悬架与非独立悬架的特点━侧倾力矩中心的高度:多数非独立悬架和横单臂独立悬架都较高,其它独立悬架(双横臂,纵单臂,纵双臂等)较低━有效弹簧距,独立悬架的有效弹簧距等于轮距,非独立悬架通常较小,特殊布置可以不同eBeBsBeB24Benz─600前悬架━上下跳动时主肖后倾角都会增大━具有明显的“抗点头角”━可安排所需要的侧倾力矩中心高度(前轮与车身纵向的相对瞬心)2XZp1XZp2XZpk1YZp2YZp1YZp1XZp1r2r1XZp22YZp2YZP1YZP1225“半独立”纵单臂后悬架━侧倾时横梁中点是一个“不动点”,因此可看成一种“斜置单臂”却只有一个铰点━横梁前移“臂长”增大,移至铰点处独纵单臂。移至轮轴线臂长为半轮距(非独立悬架)从1/1独立悬架~0.5/1~0/1悬架(非独立悬架)26三杆式前悬架27空间四杆式后悬架28━虚擬主肖:上两杆与下两杆交点尽量接近车轮中心面━纵向瞬心与横向瞬心位置可以任意选择━可以满足,引起的弹性转向要求多杆悬架━满足多种要求xFyFxZPYZPYZP1Y2Y虚擬主肖29菱帅汽车后四杆悬架30菱帅汽车四杆式后悬架—高不足转向的随动转向性能2YZP1YZP122YZP1YZP12hw中性面纵倾中心侧倾中心虚拟主销后拖距虚拟主销313、轮荷转移分析3.1、纵向轴荷转移高速时要考虑空气阻力PZ2PX1PX2PZ1Mg在坡道上的轴荷转移在驱动与制动时的轴荷转移Mg32侧向轮荷转移的主要组成(时)━弹簧力转移(静不定问题弹簧力转移取决于弹簧刚度分配,由弹簧变形计算)━导向力转移(由作用在力矩中心处的侧向力计算)在同时存在与时,轮荷应叠加当增大时大的轴,轮荷转移加剧,会导致侧偏角急剧增大0X=XYyeY3.2、侧向轮荷转移334、侧倾转向4.1、非独立悬架的侧倾转向钣簧的侧倾转向非独立悬架纵向单臂非独立四连杆悬架━求轮心轨迹和三杆机构需求三点座标CA,Bd2r43x34独立纵单臂━水平轴前后移动不产生转角━非水平轴“八”字轴的不足转向性横向单臂和斜单臂独立悬架━侧倾转向性、等效臂长━铰轴的垂直分量前独立悬架与转向杆系的干涉转向多杆机构的杆涉转向等效简化原理4.2、独立悬架的侧倾转向等效系统xZ35转向系弹性引起的附加转角导向系弹性引起的附加转向独立纵臂与斜单臂后悬架的侧向力转向倾向侧向力导致轮胎侧倾yFsykxaC/)FD(x+=dyFzF5、侧向力转向xDkxanddd+=Fy2Fy136随动转向后悬架—逆向弹性转向桑塔那的后悬架富康的随动转向后悬架yFyF37刹车转舵问题:r太大盘式制动的优点纵向力引起车轮侧倾ABS引起的转向扰动DYC引起的转向扰动多杆悬架制动时的板簧卷曲6、纵向力转向ρ0ρ38制动时的板簧卷曲造成制动转向6、纵向力转向39━加大前拉杆的柔性,使后轮在侧向力作用下产生向内转向角━通过弹性转角来抵消侧偏角,以提高后轮有效侧偏刚度━可以设计虚擬主肖位置,引起适当的弹性转向以增进制动稳定性多杆随动转向后悬架xFyFxZPV虚擬主肖.407、轮胎特性与稳态转向特性*ya1da)(d.LvGy2120dd=kVy212cda)(d/Lvdd=L121dd2VR1ded21ddya中性转向点1d2d'1d临界车速开环增益时不稳定:-yayaU.Sy21add2V过度转向区41影响稳态转向特性的因素轮胎特性与稳态转向特性稳态转向特性转折的原因1r1c112r2c22dddddd++=++=–侧倾刚度比–侧倾力矩中心高度–随的而–轮胎侧偏特性的饱和–驱动力对饱和的影响–制动力分配x2121De/eC/C1cd1yF2yF1ZF1d12d2d2211d1rdy2r2cdd+2ZF42改善稳态转向特性的措施轮胎特性与稳态转向特性–前置横向稳定器–后非独立悬架Bs2–后非独立悬架板簧下置–后板簧前低后高–后非独立中心弹簧–老Benz的后悬架:h2,中心弹簧43–“随动转向”–后悬架的反稳定杆轮胎特性与稳态转向特性44v8、汽车操纵动态响应的基本分析二自由度角输入运动(线性模型)运动模型与座标dtdvYb+=XYZ固定于汽车重心)r(+b侧偏角:rvbrva21b=dd+b=d2vv2yPb绝对座标d1y1yP2dLba1dYXvxv45二自由度角输入运动微分方程、传递函数其中拉氏变换得传递函数1y2yZaPbPrI+=)rv(KKP1111yd+b=d=221rrSTST1S1G)s(r+++=d221STST1S1G)s(+++=dbbb)Kv1(CCC)b(C)b(LvT221211++++=)Kv1(CCvT22122+=22vbCvb=b2rC/v=)Kv1(LC/vbG222+=b)Kv1(LvG2r+=222111m/KC,m/KC==)C1C1(L1K21=)PP()r(mv1y2y+=+b)vb(KKP2222yb=d=461)(Rew)(w相位s/m10=s/m10=rG/)j(rwdd/r)RI(tem1g=)(Imww2m2erIRG+=20406080s/m40=vs/m40=)s/rad(w频率特性:传递函数中令S=jω,其实部与虚部均为的函数,二自由度角输入运动即实频特性与虚频特性:幅频特性:宽平为优相频特性:以小为优频率特性:—低速:增益平坦相位滞后—高速:增益高峰低度频超前高频滞后246810121416vvvv47A0T,0T21K1c=n\05.oeTT与ee05.0T320ln.TT==eTtAe二自由度角输入运动角输入运动特征稳定条件:传递函数分母为特征函数,根的实部不大于0的条件为:名义自然频率过渡时间,即)Kv1(ccT122122+==w1STST)s(D122++=21212eccv2)/ba(c)/ab(cvL2TT2T++++==0Kv12+48反应速度与反应时间相对阻尼系数t当二自由度角输入运动n++++==/cc)K1(2)/ba(c)/ab(cT2T21221211)c1c1(L1K,)K1(1212=n+2121cc2cc+得r2sr0tsfssrr0s0tT)0(rG)t(rrTTGs)s(r.lim)t(r=d==d=ddd===时,sg)t(gfT49
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 庆哥哥
庆哥哥
本文标题:悬架设计理论
链接地址:https://www.777doc.com/doc-3254053 .html