您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 咨询培训 > 第5章 KUKA机器人基本维护
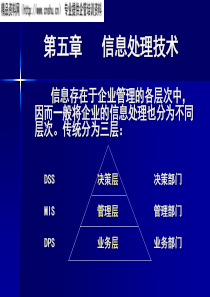
第5章KUKA机器人基本维护操作中的安全设备213安全操作措施KRC4计算机组件KUKA工业机器人编程与实操技巧4KRC4的总线系统5网络技术基础6基于以太网的重要现场总线系统7故障诊断8KRL的切换函数9WorkVisual开发环境第5章KUKA机器人基本维护机器人系统必须始终装备相应的安全设备,例如隔离性防护装置(防护栅、门等)、紧急停止按键、制动装置、轴范围限制装置等,如下图所示。①②③④⑤⑥①②③④⑤⑥①防护栅②轴1、2和3的机械终端止挡或者轴范围限制装置③防护门及具有关闭功能监控的门触点④紧急停止按钮(外部)⑤紧急停止按钮、确认键、调用连接管理器的钥匙开关⑥内置的(V)KRC4安全控制器操作工业机器人时应采取的安全措施包括:1)当机器工作结束后,机器人控制系统必须关机,并采取合适措施(例如用挂锁锁住)防止未经许可的重启。2)操作人员对控制柜内进行操作时,须等待5min,直至中间回路完全放电。3)当操作或维护人员离开工作现场时,必须切断电源线的电压。4)如果必须在机器人控制系统启动状态下开展作业,则只允许在运行方式T1下进行。5)在设备上悬挂标牌用以表示正在执行的作业。暂时停止作业时也应将此标牌留在原位。6)紧急停止装置必须处于激活状态。若因保养或维修工作需将安全功能或防护装置暂时关闭,在此之后必须立即重启。7)已损坏的零部件必须采用具有同一部件编号的备件来更换,或者采用经库卡公司认可的同质外厂备件来替代。8)必须按操作指南进行清洁养护工作。9)在拆卸片状零部件时需穿戴劳保手套,以防锐边刮伤。。第5章KUKA机器人基本维护第5章KUKA机器人基本维护控制系统计算机组成控制系统计算机由电源件、主板、DualNic双网卡、RAM存储器和硬盘构成。如下图所示。①②③④⑤⑥①②③④⑤⑥控制系统PC组成①硬盘②主板③PC接口④处理器冷却器⑤PC风扇⑥计算机电源件第5章KUKA机器人基本维护控制系统计算机的功能1)通过中央处理器的第二核(RC,RobotControl,机器人控制)进行调节。2)PLC(选项)与RC平行接收处理。3)控制系统计算机可调节与客户的内部和外部网络通信。控制系统计算机接口及说明如下图和下表所示。序号接口序号接口1插头X961电源DC24V5现场总线卡插座1~72PC风扇的X962插头6现场总线卡插座1~73LAN双网卡DualNIC:库卡控制器总线-CCUX3178USB2.0端口4LAN双网卡DualNIC:库卡线路接口-以太网转换器第5章KUKA机器人基本维护计算机插槽分配及说明如下图和下表所示。插槽名称插卡1PCI1现场总线(选项)2PCI2现场总线(选项)3PCIe16LAN双网卡DualNIC4PCIe1未使用5PCIe16显卡(选项)6PCI3现场总线(选项)7PCIe4未使用第5章KUKA机器人基本维护控制系统计算机的更换步骤1)将控制系统关机并采取措施防止其被无意重启。2)拔出连接到控制系统计算机的电源线及所有连接线。3)拆下控制系统计算机并向上取出。4)将通风槽从旧控制系统计算机中拆出,然后装入新控制系统计算机上。5)装入新的控制系统计算机,然后固定。6)插好各种插头。7)实施功能测试。第5章KUKA机器人基本维护KRC4控制系统计算机主板用的是为库卡定制的Fujitsu牌工业总线,采用英特尔双核中央处理器技术,配设2.8GHz双核和1GBRAM。主板接口插槽如下图所示,说明如下表所示。接口名称插卡1主板接口主板内建网络和USB2主板插槽显卡等3SATA接口硬盘等已损坏的主板不单独更换,而是连同控制系统计算机一起更换。第5章KUKA机器人基本维护库卡DualNIC是一种可供两个总线系统(KLI库卡线路接口和KCB库卡控制器总线)使用的双工网卡(如下图)。该网卡是为适应库卡要求而专门开发的。第5章KUKA机器人基本维护拆出DualNIC的步骤如下:1)打开计算机机箱。2)拔出双网卡的接合件。3)松开网卡紧固件(如下图①),然后将网卡从插槽中拔出。①①①网卡紧固件第5章KUKA机器人基本维护更换DualNIC的步骤如下:1)固定螺钉。2)将双网卡插入插槽并拧紧。3)插入网卡的接合件。4)实施功能测试。第5章KUKA机器人基本维护KRC4硬盘包含必要的操作系统以及机器人系统运行所需的软件和所有数据。如下图所示。第5章KUKA机器人基本维护作为库卡硬盘的替补,还可使用库卡的非旋转式存储盘,库卡烧制的SSD(SolidStateDisc,固态硬盘)具有与标准硬盘相同的规格和接口。如下图所示。使用SSD可缩短系统启动时间,且可避免条件很差的环境(例如:振动)造成器件损坏。SSD划分为三个分区,其中第三个分区属于隐藏的恢复分区。该分区可通过库卡恢复工具来读写。第一分区与C盘对应,第二分区与D盘对应。SSD里存有WindowsXPe、库卡系统软件和工艺数据包(选项)。第5章KUKA机器人基本维护SSD装卸的操作步骤:1)将控制系统关机并采取措施防止其被意外重启。2)解锁并拔出SATA(一种总线接口,用于主板与存储设备之间的数据传输)插头(下图①)。3)拔出电源插头(下图②)。4)松开滚花螺钉(下图③)。①②③①②③①SATA插头②电源插头③滚花螺钉第5章KUKA机器人基本维护6)用新的同类存储盘将旧的换下。7)插接SATA和电源。8)用滚花螺钉固紧存储盘。9)安装操作系统和库卡系统软件(KSS)。10)工业机器人的系统结构必须用WorkVisual进行配置。11)实施功能测试。如果更换了硬盘,则可导入最近的安装程序存档(代替通过WorkVisual的配置)。第5章KUKA机器人基本维护计算机电源件用于主板、硬盘等的电源供应(如下图)。计算机电源件的输入电压为27V,其不能替换成输入电压为230V的常用电源件。①①①电脑电源件第5章KUKA机器人基本维护计算机电源件的更换方法:1)将控制系统关机并采取措施防止其被无意重启。2)打开计算机机箱。3)拔出主板、硬盘和机壳的连接线。4)松开摆动架底面里的固定螺钉,然后小心地拉出电源件。5)装入新的计算机电源件并拧紧。6)插入电源件的连接线。7)实施功能测试。第5章KUKA机器人基本维护RAM存储器模块用于装载操作系统WindowsXPe和VxWorks。设备出厂时已装配两块库卡模块,每块容量大小为512MB。如需升级装备,只允许采用库卡提供的RAM存储器。如下图所示。第5章KUKA机器人基本维护更换RAM存储器的操作步骤:1)在更换RAM存储器之前,必须先将计算机电源件拆出。2)将侧面搭攀(如下图①)解开,然后将RAM存储器往上推。3)取出存储器模块。①②①③①②①③①侧面搭攀②编码缺口③插座4)换上新的存储器模块。5)将RAM模块小心地推入插座(如上图③)内,其中需注意编码缺口(如上图②)的具体位置。6)检查侧面搭攀(如上图①)是否已锁紧。7)重启控制系统,启动后单击“主菜单”“帮助”“信息”,检查RAM的安装情况。第5章KUKA机器人基本维护计算机风扇用于计算机组件及整个机箱内部范围的冷却。计算机风扇是控制柜内部的唯一风扇。如下图所示。为确保空气循环,必须关闭控制柜门。如果控制柜门打开,空气循环将由于空气槽而中断进而导致箱内温度骤升。①①①电脑风扇第5章KUKA机器人基本维护计算机风扇更换的操作步骤:1)通过总开关使控制系统关机。2)将控制系统PC拆出。3)将PC盖打开。4)松开并拔出风扇插头(如下图①)。①①①风扇插头第5章KUKA机器人基本维护5)将风扇朝装配栓塞(如下图①)的里侧拉出。6)将开口铆钉(如下图②)拔出,再将网栅(如下图③)取出。7)将网栅(如下图③)装入新风扇上,然后用开口铆钉紧固。8)将装配栓塞(如下图①)装入风扇。9)将风扇装入计算机机壳,并将装配栓塞(如下图①)穿过计算机机壳。10)实施功能测试。①②③①②③①装配栓塞②开口铆钉③网栅第5章KUKA机器人基本维护①②③④⑤⑥⑦⑧⑨⑩⑪⑫⑬⑭⑮①②③④⑤⑥⑦⑧⑨⑩⑪⑫⑬⑭⑮①KSPA1-3②KSPA4-6③KPP+(A7/8)④库卡线路接口⑤DualNIC双网卡⑥以太网主板⑦库卡系统总线⑧库卡控制器总线⑨库卡控制器总线⑩CCU⑪工业以太网—控制系统转换器⑫RDC⑬库卡控制器总线⑭操作面板接口⑮库卡smartPAD第5章KUKA机器人基本维护控制柜(CCU)包含两块电路板(CIB控制柜接口板和PMB电源管理板),是机器人控制系统所有组件的配电装置和通信接口。如下图所示。所有数据通过内部通信传输给控制系统,并在那里继续处理。当电源断电时,控制系统部件接收蓄电池供电,直至位置数据备份完成,控制系统关闭。通过负载测试检查蓄电池的充电状态和质量。①①②①①②①连接板插接片②固定螺钉第5章KUKA机器人基本维护控制柜的组成1)机器人控制系统部件的通信接口。2)安全输出端和输入端。①控制主接触器1和2。②校准定位。③插入库卡smartPAD。3)8个适用于客户应用程序的测量输入端(节拍125μs)。4)监控机器人控制系统中的风扇。①外部风扇。②控制系统计算机的风扇。第5章KUKA机器人基本维护5)温度值采集:①变压器的热效自动开关。②冷却器的信号触点。③主开关的信号触点。④镇流电阻温度传感器。⑤柜内温度传感器。6)通过库卡控制器总线与控制系统计算机相连接的部件。①KUKAPowerPack/KUKAServoPacks。②分解器数字转换器。7)通过库卡系统总线与控制系统计算机相连接的组件。①库卡smartPAD。②安全接口板。8)诊断LED。9)电子数据存储器的接口。第5章KUKA机器人基本维护控制柜的电源(1)缓冲式供电(供电状态变化过程有缓冲)有KPP、KSP、库卡smartPAD、控制系统多核计算机、控制系统操作面板(CSP)和分解器数字转换器(RDC)。(2)非缓冲式供电(供电状态变化过程无缓冲)有电动机制动装置、外部风扇、客户接口和快速测量输入端。第5章KUKA机器人基本维护控制柜的熔丝和LED指示灯控制柜的保险装置的排布如下图所示,说明见书P164表5-4。第5章KUKA机器人基本维护CCU的LED指示灯如下图所示,说明见书P165表5-5。第5章KUKA机器人基本维护控制柜的更换步骤1)关闭控制系统并采取安全措施,防止未经授权的重启。2)将数据线插头解锁,拔出控制柜(CCU)上的所有接线。如下图所示。①②③③③①②③③③①插头已解锁②插头已锁闭③插头已插入并锁闭第5章KUKA机器人基本维护3)取下固定板上的螺栓,将固定板连同CCU从连接板开口处拉出。4)检查新CCU是否有机械损伤。将固定板连同CCU插入连接板开口,然后拧紧。如下图所示。①①②①①②①连接板插接片②固定螺钉5)按照插头和线缆说明将所有接口插入。将数据线插头锁紧。6)实施功能测试。第5章KUKA机器人基本维护属于KCB的设备有KPP(配电箱)、KSPA1-3(伺服包)、KSPA4-6(伺服包)、RDC(分解器数字转换器)、EMD(电子控制装置,可耦联式用户)。第5章KUKA机器人基本维护库卡KPP库卡KPP是驱动电源,可从三相电网中生成整流中间回路电压。利用该中间回路电压可给内置驱动调节器和外置驱动装置供电。KPP有4种规格相同的设备变形:KPP不带轴伺服系统(KPP600-20);KPP带单轴伺服系统(KPP600-20-140),输出端峰值电流140A;KPP带单轴伺服系统(KPP600-20-164),输出端峰值电流164A;KPP带双轴伺服系统(KPP600-20-140),输出端峰值电流240A。KPP上设有显示工作状态的LED指示灯。第5章KUKA机器人基本维护(1)KPP的特点:1)KPP复合运行中的中央交流电源接口:馈电压为400V时设备功率为14kW,额定电流为DC25A。2)接通和关断电源电压。3)用直流中间回路为多个轴伺服系统供电。4)带外部镇流电阻接口的集成制动斩波器。5)镇流电阻的过载监控。6)通过短路制动使同步伺服电动机停止运转。第5章KUKA机器人基本
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码

![18[1]第二编 第二章 物理、生物综合](/doc-278397.png)

 plg123456
plg123456
本文标题:第5章 KUKA机器人基本维护
链接地址:https://www.777doc.com/doc-3379897 .html