您好,欢迎访问三七文档
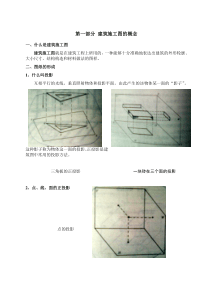
永磁同步电机的矢量控制原理华南理工大学自动化科学与工程学院SouthChinaUniversityofTechnology黄飞关键词:矢量控制坐标变换SVPWM1.永磁同步电动机简介永磁式同步电动机结构简单、体积小、重量轻、损耗小、效率高,和直流电机相比,它没有直流电机的换向器和电刷等缺点。和其他类型交流电动机相比,它由于没有励磁电流,因而效率高,功率因数高,力矩惯量比较大,定子电流和定子电阻损耗减小,且转子参数可测、控制性能好;但它与异步电机相比,也有成本高、起动困难等缺点。和普通同步电动机相比,它省去了励磁装置,简化了结构,提高了效率。永磁同步电机矢量控制系统能够实现高精度、高动态性能、大范围的调速或定位控制,因此永磁同步电机矢量控制系统引起了国内外学者的广泛关注。近些年,人们对它的研究也越来越感兴趣,在医疗器械、化工、轻纺、数控机床、工业机器人、计算机外设、仪器仪表、微型汽车和电动自行车等领域中都获得应用。1.1永磁同步电机系统的结构永磁同步电机的基本组成:定子绕组、转子、机体。定子绕组通过三相交流电,产生与电源频率同步的旋转磁场。转子是用永磁材料做成的永磁体,它在定子绕组产生的旋转磁场的作用下,开始旋转。2.坐标变换2.1坐标变换坐标变换,从数学角度看,就是将方程中原来的一组变量,用一组新的变量来代替。线性变换是指这种新旧变量之间存在线性关系。电动机中用到的坐标变换都是线性变换。在永磁同步电机中存在两种坐标系,一种是固定在定子上的它相对我们是静止的,即:α,β坐标系,它的方向和定子三相绕组的位置相对固定,它的方向定位于定子绕组A相的产生磁势的方向,另一种是固定在转子上的旋转坐标系,我们通常称之为d,q坐标,其中d轴跟单磁极的N极方向相同,即和磁力线的方向相同,q轴超前d轴90度下图所示。在矢量控制中,我们获取的是定子绕组上的三相电流,所以我们还需要做的一个问题是怎么把三相电流产生的电流矢量等效到α,β坐标系中和d,q坐标系中去。先讨论α,β坐标系和A,B,C三相之间的变换(以电流为例)。对于任意矢量有:同时有:把电流在上图进行分解的得分别是向量在α轴β轴A轴B轴和C轴上的投影考虑到电枢绕组在不同坐标系的合成磁势相等和功率不变等因数,需要在它前面加了个系数。变换也称Clarke变换abc/变换也称为Clarke逆变换/dq(Park变换)和其逆变换如下:由于矢量控制能为永磁同步电机带来像直流电机一样的调速性能,而矢量控制又是建立在坐标变换理论下的体系,因此我们有必要讨论一下永磁同步电机在d,q坐标系下的数学模型。其电路方程如下:转矩方程如下:在永磁同步电机中通常采用id=0,所以可见电磁转矩和q轴电流成正比,只要对电流进行控制就达到了控制转矩的目的。同时这样也能保证最大的输出转矩。其运动方程如下:其中TL,J分别为电机的阻转矩和转动系统的转动惯量3矢量控制原理介绍3矢量控制原理介绍矢量控制亦称磁场定向控制(FOC),其基本思路是:通过坐标变换实现模拟直流电机的控制方法来对永磁同步电机进行控制,其实现步骤如下:一、根据磁势和功率不变的原则通过正交变换,将三相静止坐标变换成二相静止坐标,也就是Clarke变换,将三相的电流先转变到静止坐标系,再通过旋转变换将二相静止坐标变成二相旋转坐标,也就是Park变换,Park变换中定子电流矢量被分解成按转子磁场定向的2个直流分量id、iq(其中id为励磁电流分量,iq为转矩电流分量)。二、通过控制器对其速度电流环进行控制,控制id就相当于控制磁通,而控制iq就相当于控制转矩。Iq调节参考量是由速度控制器给出,经过电流环调节后得出其d,q轴上的电压分量即ud和uq。.三、控制量ud和uq通过Park逆变换。四、根据SVPWM空间矢量合成方法实现矢量控制量输出,达到矢量控制的目的。4SVPWM产生原理SVPWM是空间电压矢量PWM波产生,它具有电压利用率高、低谐波成分、开关次数少和功率管功耗小等特点。同时,SVPWM还能很好的结合矢量控制算法,为矢量控制得实现提供很好的途径,以最大限度的发挥设备的性能。因此被越来越多的变频设备所采用。4.1电压空间矢量SVPWM技术的基本原理电压矢量与磁链矢量的关系:当用三相平衡的正弦电压向交流电机供电时,电动机的定子磁链空间矢量幅值恒定,并以恒速旋转,磁链矢量的运动轨迹形成圆形的空间旋转磁场(磁链圆)。因此如果有一种方法,使得逆变电路能向交流电动机提供可变频、并能保证电动机形成定子磁链圆,就可以实现交流电动机的变频调速。电压空间矢量是按照电压所加在绕组上的空间位置来定的。电动机的三相定子绕组可以定义一个三相平面静止坐标系这是一个特殊的坐标系,它有三个轴,互相间隔120度,分别代表三个相。三相定子相电压Ua,Ub,Uc,分别施加在三相绕组上,形成三个相电压空间矢量Ua,Ub,Uc,它们的方向始终在各相的轴线上,大小则随着时间按正弦规律变化。因此,三个相电压空间矢量相加所形成的一个合成电压空间矢量是一个以电源角频率w速度旋转的空间矢量:同样的,也可以定义电流和磁链的空间矢量I和。因此有当转速不是很低的时候,定子电阻R的压降相对较小该式说明,当磁链幅值一定时,的大小与成正比,或者说供电电压与频率f成正比。其方向是磁链轨迹方向的切线方向。当磁链矢量在空间旋转一周时,电压矢量也连续地按磁链圆的切线方向运动弧度,其运动轨迹与磁链圆重合。这样,电动机旋转磁场的形状问题就可转化为电压空间矢量运动轨迹的形状问题来讨论。此图是一个典型的电压型PWM逆变器。利用这种逆变器功率开关管的开关状态和顺序组合,以及开关时间的调整,以保证电压空间矢量圆形运行轨迹为目标,就可以产生谐波较少的、且直流电源利用率较高的输出。SVPWM是通过三相交流逆变桥的6个开关的不同导通模式产生不同的电压基本矢量,通过矢量合成,来合成任意矢量(在实际允许范围内),通过导通时间的不同大小,来确定矢量的大小,这也就是PWM调制的原理。上图是一个典型的电压源型PWM逆变器模型。令a=0,表示在第一组桥臂中:上桥臂截至,下桥臂导通,a=1,表示第一组桥臂中:上桥臂导通,下桥臂截至,同理定义b,c对应于第二组桥臂和第三组桥臂中上下桥臂的导通关系,因为实际的工作状态不允许逆变的同一组桥臂同时导通,V(a,b,c)有8种导通状态即V(000),V(001),V(010),V(011),V(100),V(101),V(110),V(111)。可以推导出,三相逆变器输出的线电压矢量与开关状态矢量的关系为:三相逆变器输出的相电压矢量与开关状态矢量的关系为SVPWM通过这六个基本向量和零向量来合成我们所需的向量,可见这六个向量把向量空间分为六部分,在不同区间内,向量都可使用它邻近的两个基本向量来进行合成,可以使用PWM的概念通过占空比来调节基本的大小,通过在采样周期内导通时间的控制来近似被调制向量在该方向上的大小。A,B,C三相在空间上相差120度,通过矢量合成可以得到V(a,b,c)在空间上形成电压空间矢量,可见,除V(000)和V(111)以外(通常把这两个向量称为零向量),它们在空间上成对称的正六边形,其所在圆的半径为Vs。ABCaß100101u001011110010u100u110u010u011001u101123456000111Uo如果向量如图所示位置则:目前最流行的是七段式电压空间矢PWM波形,它由3段零矢量和4段相邻的两个非零向量组成,3段零矢量分别位于PWM波的开始、中间和结尾。每个PWM波的零矢量和非零矢量施加的顺序,以及所对应的时间都可以从下图得到。总结:永磁同步电机的矢量控制原理本质上就是围绕着如何建立一个旋转的空间磁场。电机转动实质上就是空间磁场的转动。谢谢!
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


![[财务管理]《会计基础》2(ppt 102页)](/doc-1119373.png)

 adam335335
adam335335
本文标题:永磁电机原理
链接地址:https://www.777doc.com/doc-3496838 .html