您好,欢迎访问三七文档
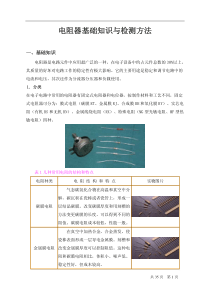
第十章船舶舵机的电力拖动与控制§10-1.舵机的电力拖动与控制的基本要求§10-2.操舵方式及其基本工作原理§10-3.自动舵的基本类型及其调节规律§10-4.自动舵系统基本工作原理第十章小结学习第十章应该注意的点第十章学习应注意的几个问题:1.对船舶舵机有什么基本要求?2.有几种操舵方式?3.各种操舵方式有什么特点?4.自动舵是怎样工作的?5.自动舵有几种调节规律?各种调节规律分别起什么作用?相对比较难的点:1.各种操舵方式的工作原理;2.自动舵各种调节规律的特点。§10-1.舵机的电力拖动与控制的基本要求本节主要内容有两个部分1.舵机装置:主要掌握舵机的分类特点。2.电力拖动与控制的基本要求:——三个方面供电、电动机、控制系统一、舵机装置舵机装置分为两类:⑴.电动-机械;⑵.电动-液压。电动-机械舵机装置:工作过程:电动机通过连轴节带动蜗杆蜗轮转动,并通过主动齿轮带动扇形齿轮,再经过缓冲弹簧转动舵柄(在扇形齿轮下面,通过弹簧推动),从而使舵柱和舵叶偏转。系统组成:——一般采用G-M系统。作用:蜗杆蜗轮传动,大变比减速,能够锁定舵柱和舵叶。缓冲弹簧,减轻船舶在航行中波浪对舵叶的冲击力,防止传动装置受到损伤。电动—液压舵机装置系统组成:恒速电动机(可用普通异步机)拖动双向变量油泵,提供双向的高压油驱动液压油缸。工作过程:当一油缸注入高压油而另一油缸排出低压油时,推动撞杆(活塞)移动,从而带动舵柄,舵柱和舵叶偏转。基本要求:——三可靠。1.供电;2.电动机运行;3.控制系统——都要可靠。供电:采用双路供电,两路分离较远的馈电线,其中一路经应急配电板。电动机:机械特性软(抗冲击),转矩大(35°-30°,28秒),能承受1分钟的堵转。控制系统:至少两个操作站(由转换开关切换,防止同时操作),有三种操舵方式(手动、随动、自动)。[第一节要点]:舵机的分类、特点;基本要求。对舵机装置的要求§10-2.操舵方式及其基本工作原理本节主要内容有三个部分——即三种操舵方式的工作原理,主要掌握它们的作用、特点和工作原理。1.单动操舵工作原理2.随动操舵工作原理3.自动操舵工作原理单动(香蕉柄)操舵:——在海船上就是应急操舵。方法:手扳舵转,复零舵停;左舵左扳,回舵右扳;右舵右扳,回舵左扳。——人看分罗经和舵角指示器操舵。原理:转换开关改变发电机励磁方向,从而使电动机反转。单动操舵工作原理电动机励磁不变。随动操舵,又叫“舵轮操舵”。随动——舵叶随着舵轮转动。方法:左偏航操右舵,舵轮操右几度,舵叶右偏几度(右偏也相似)。原理:是负反馈调节系统。以舵角和舵轮的偏差控制电动机。操舵过程:舵轮向右转过一个角度α,电位器R1的滑动点移动,电桥失去平衡,放大器输入信号0,发电机输出电压使电动机顺时针方向转动,使舵叶向右偏转。同时舵角反馈同步传递机构带动反馈电位器R2的滑动点不断向a’点移动。当电桥重新处于新的平衡状态时,放大器输入=0,电动机停转,舵叶处于右舵与舵轮转动相对应的角度上。回舵过程相似,只是放大器输入变反,电动机反转,舵叶回偏。随动操舵工作原理自动操舵:实际上是自动航向保持仪。组成原理:利用电罗经检测船舶实际航向α,然后与给定航向K°进行比较,其差值作为操舵装置的输入信号,使操舵装置动作,改变偏舵角β。在舵角的作用下,船舶逐渐回到正航向上。船舶回到正航向后,舵叶不再偏转。线路分析:最简单的电动操舵线路的工作过程见。操舵过程:见下图自动操舵工作原理[第二节要点]:操舵方式(种类、原理);自动操舵仪组成原理。§10-3.自动舵的基本类型及其调节规律本节主要内容有1.自动舵的基本类型:——三种比例、比例-微分、比例-微分-积分2.三种自动类型的作用和特点自动舵方框图自动操舵基本类型定义:自动舵的基本类型是指按操舵的规律分类的(也就是舵的偏转规律)类型,而不是舵机装置的类型。三种基本类型:⑴.比例舵;⑵.比例-微分舵;⑶.比例-微分-积分舵。说明:不同基本类型的自动舵,对舵叶的调节规律是不同的。偏航与操舵比例舵比例舵操舵的规律是:偏舵角β的大小与偏航角φ的大小成比例关系,即:β=-K1φ其中:K1为比例系数,负号表示与偏航方向相反。特点:机构简单,航行保持精度较差,船舶营运经济性较差(会出现S形航迹)。比例舵的不足:偏航初期偏舵角较小,不能很快阻止船舶继续偏航;回航过程中船舶具有惯性,偏舵角不能及时减小,容易反向偏航。比例-微分舵操舵的规律是:偏舵角β的大小与偏航角φ的大小成比例-微分关系,即:β=-(K1φ+K2dφ/dt)其中:K1为比例系数,K2为微分系数。说明:偏航初期,偏航角变化率大,比例-微分舵能及时给出大偏舵,有效地阻止船舶偏航(最大偏航角较小);回航时,偏航角变化率变为负值,能适时给出反舵角,阻止船舶反向偏航,即能有效阻止反向偏航。主要特点:具有“超前校正”的控制作用,减小船舶航向的振荡,减轻舵机负担,增加航速,提高系统灵敏度和船舶的营运效益。比例-微分舵比例-微分-积分舵组成:是在比例-微分舵基础上增加积分环节。积分环节作用是——克服不对称偏航。K3是积分系数。不对称偏航的产生:不对称偏航是某舷(侧)的偏航角持续时间比另一舷(侧)偏航角持续时间长。原因:装载不对称,斜向风的持续影响,斜向海潮的持续影响。——对于具有双螺旋桨推进的船舶,螺旋桨推进的不平衡也会产生不对称偏航。积分环节工作原理:积分环节可以对偏航持续时间进行累积,当某舷(侧)偏航持续的时间比另一舷(侧)持续时间长时,通过环节输出的信号(偏舵角)将继续保持,这个信号将通过执行机构使舵叶维持在一定的偏转角度上,从而使船舶具有克服单向偏航的能力。比例舵:可以克服偏航,但容易形成S形航迹,航程较长。比例-微分舵:可以减小最大偏航角,克服回航时的反向偏航。但微分系数不能太大,否则容易造成不稳定。比例-微分-积分舵:能够产生“自动压舵”调节,克服不对称偏航。[第三节要点]:自动舵的基本类型;各种调节规律的性能、特点。操舵定律特点比较§10-4.自动舵系统基本工作原理本节主要内容有两部分1.PID自动舵系统的工作原理2.适应舵的基本概念和调节原理这两部分的主要要求是了解各自的有关概念概述:具有比例、微分和积分调节作用的自动舵称为PID自动舵。这种PID舵实际上是航向保持仪,不能实现航迹的自动跟踪。而且,在不同的海况下,比例、微分、积分等参数需要人为地进行调节,才能达到比较满意的调节效果。PID自动舵原理:电罗经和自整角机将船舶的实际航向和给定航向比较,得到偏航信号经发讯器2和相敏整流器整流后送到灵敏度调节器,再经过比例、微分和积分环节(5、6和13)调节后,由放大器8和功率放大器9进行放大,送给执行机构10对舵机进行调节控制。一、PID自动舵系统工作原理二、自适应舵的基本概念和调节原理定义:通过计算机将所有检测信号进行处理,使舵机按照给定航线进行操舵的自动舵称为自适应舵。自适应舵可以自动对航线进行判别,可以自动修正内部参数(例如比例系数等)以适应船舶的各种状态或海况。分类:——可分为两类自校正自适应控制系统和模型参考自适应控制系统。自校正控制系统:自动校正系统的控制参数,使性能指标接近最优。模型参考控制系统:设计一个理想(最优)的参考模型,计算机根据实际检测,实现接近该理想模型的控制规律。说明:具体工作原理分析需要较深基础知识。因此,本节只做一般了解。[第四节要点]:自适应舵的概念和类型。自适应舵说明第十章各节要点各节要点:第一节:舵机的分类、特点;基本要求。第二节:操舵方式(种类、原理);自动操舵仪的组成原理。第三节:自动舵基本类型;各种调节规律的性能、特点。第四节:自适应舵的概念和类型。第十章的主要内容主要内容:船舶舵机的“基本要求”、“操舵方式”和“基本调节规律”。要求掌握舵机的基本要求,知道各种操舵方式的使用场合、各自特点及系统的组成;要求掌握舵机的基本类型,知道各种调节规律自动舵的使用场合、各自特点及系统的组成,明白各种“调节规律”的输出输入关系。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码





 413009782
413009782
本文标题:10第十章舵机
链接地址:https://www.777doc.com/doc-3850245 .html