您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 公司方案 > 三维点云的重建与匹配
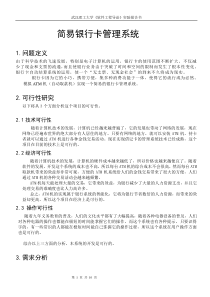
三维点云的重建与匹配CONCENTS目录背景介绍点云配准稀疏点云重建010203实验结果04背景介绍VestibulumanteipsumprimisinfaucibusorciluctusetultricesVestibulumanteipsumprimisinfaucibusorciluctusetultrices14VestibulumanteipsumprimisinVestibulumanteipsumprimisinfaucibusorciestibulumanteipsumprimisinfaucibusorcaucibusorci相关背景:随着数字城市不断向前发展,大规模三维数据采集技术迅速提升,可以通过激光原理、摄影测量原理等方式产生多种点云数据。在实际获取三维点云时考虑到测量设备、测量范围的限制以及被测物体外形的复杂性等,每次扫描只能获取当前视点下的点云,其坐标是相对于当前的仪器坐标系而言的,要得到被测物体完整的三维模型,需要从不同的视点对被测物体进行扫描,并将不同视点获取的三维点云进行配准。稀疏点云重建VestibulumanteipsumprimisinfaucibusorciluctusetultricesVestibulumanteipsumprimisinfaucibusorciluctusetultrices26稀疏点云重建步骤:(1)特征点的提取特征点指的是图像灰度值发生剧烈变化的点或者在图像边缘上曲率较大的点(即两个边缘的交点)。当前比较常用的特征点提取算法:1)尺度不变特征变换算法(ScaleInvariantFeatureTransform,SIFT)2)加速鲁棒特征算法(Speeded-UpRobustFeature,SURF)场景的三维重建问题可总结为:从二维空间中的点估计相机的位置、投影矩阵以及恢复场景在三维空间中的点。7(2)图像特征点匹配在特征点提取完成之后,就需要对立体图像进行特征匹配,当前常用的特征点匹配算法:1)归一化互相关技术(NormalizedCrossCorrelationMethod,NCC)2)最近邻算法(NearestNeighbor-NN)(3)去除误匹配随机抽样一致算法(RandomSampleConsensus,RANSAC)8(4)SFM算法在特征点提取和匹配完成之后,可以用SFM算法得到稀疏的三维点云,SFM(structurefrommotion)算法是一种基于各种收集到的无序图片进行三维重建的离线算法。可以在不知道相机参数和场景三维信息的情况下通过迭代解出三维点云和相机矩阵。9(5)利用VisualSFM得到的结果点云配准VestibulumanteipsumprimisinfaucibusorciluctusetultricesVestibulumanteipsumprimisinfaucibusorciluctusetultrices311很多时候,由于设备的显示,我们需要从不同角度拍摄图像,获取点云数据,从而才能得到目标的完整的点云。这些点云需要转换到同一坐标系下,这个过程被称为配准过程。对于两个点云来说,配准的目的就在于找到一个最优的几何变换使得两个点云数据在同一坐标系下最大程度的对齐融合。点云配准最常用的是最近点迭代(IterativeClosestPoint,ICP)点云配准算法。12ICP算法的基本原理是:分别在带匹配的目标点云P和源点云Q中,按照一定的约束条件,找到最邻近点(pi,qi),然后计算出最优匹配参数R和t,使得误差函数最小。误差函数为E(R,t)为:其中n为最邻近点对的个数,pi为目标点云P中的一点,qi为源点云Q中与pi对应的最近点,R为旋转矩阵,t为平移向量。ICP算法原理13(1)在目标点云P中取点集pi∈P;(2)找出源点云Q中的对应点集qi∈Q,使得||qi-pi||=min;(3)计算旋转矩阵R和平移矩阵t,使得误差函数最小;(4)对pi使用上一步求得的旋转矩阵R和平移矩阵t进行旋转和平移变换,的到新的对应点集pi’={pi’=Rpi+t,pi∈P};(5)计算pi’与对应点集qi的平均距离;(6)如果d小于某一给定的阈值或者大于预设的最大迭代次数,则停止迭代计算。否则返回第2步,直到满足收敛条件为止。ICP算法步骤实验结果VestibulumanteipsumprimisinfaucibusorciluctusetultricesVestibulumanteipsumprimisinfaucibusorciluctusetultrices415ICP算法配准结果16ICP算法配准结果17ICP算法配准结果18ICP算法配准结果THANKYOU
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码
![桥涵井点法排水及围堰工程[1]](/doc-120173.png)
 傲视一切一切
傲视一切一切
本文标题:三维点云的重建与匹配
链接地址:https://www.777doc.com/doc-3980035 .html