您好,欢迎访问三七文档
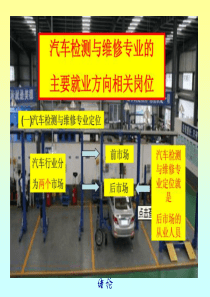
机械自动化系统设计——专业课程设计机械自动化系统(典型机电一体化系统):机械机构部件、电气(弱电和强电)控制硬件、监控软件。设计这类设备,可在完成总统方案设计后,分别进行三个方面的设计。由于三个方面的内容是不可分割的、是统一个整体,设计时必须统筹兼顾,并且,在整个设计、制造、装配、调试过程中始紧密联系,反映了其机电一体化设备的整体性。需要的知识:基础知识、专业基础知识和专业知识。涉及机械、电气、电子、软件、数控、工艺、机床、公差等多门学科的知识,是各门课程的总复习和综合应用。1.专业课程设计任务•1.1设计题目:教学用简易数控铣床•1.2技术指标详见下述附表•1.3设计的任务•(1)系统整体方案设计•(2)机械部件设计(结构图)0号图一张•(3)电气部件设计(电气逻辑原理图)1号图一张•(4)系统控制软件设计(系统软件框图)一张•(5)系统整体调试•(6)编写设计说明书一份2.课程设计步骤•(1)按设计任务规定明确设计任务按任务书的技术要求(或技术条件)进行技术分析,明确设计要求。•(2)系统方案设计•(3)机械部件•(4)电气部件•(5)控制软件设计•(6)制造设备后,要进行设备调试,排除(设计、制造)故障,发现问题则需要更改设计。•(7)整理技术文件(设计说明书)3专业课程设计安排•(1)设计日程安排•(共20个工作日)•(2)时间安排8:30-11:3013:00-16:00•(3)设计室地点安排阶段时间总体设计1天电气设计3-4天软件设计及调试2天-3天机械结构设计11-11天编写设计说明书1-2天答辩1天教学用简易数控铣床技术参数•1.工作行程X=100mm、Y=120mm、Z=40mm;•2.脉冲当量0.01mm/P;•3.重复定位精度0.02mm;•4.用户指令存储量999条ISO数控代码;•5.主机转速3000r.p.m.;•6.铣刀直径φ5;•7.X-Y二轴联动;•8.切削材料:有机玻璃等。系统方案设计教育用简易数控铣床控制系统方案•数控箱控制方案•微机控制方案•单片机方案•微机-单片机混合控制方案教育用简易数控铣床系统方案•1°单片机─普通丝杠─步进电机开环方案;•2°单片机─普通丝杠─伺服电机闭环方案;•3°单片机─滚珠丝杠─步进电机开环方案;•4°单片机─滚珠丝杠─伺服电机闭环方案;•5°微机─普通丝杠─步进电机开环方案;•6°微机─滚珠丝杠─伺服电机闭环方案;•7°(微机)-单片机─普通丝杠─步进电机开环方案(混合控制方案);•8°(微机)-单片机─滚珠丝杠─伺服电机闭环方案(混合控制方案)。(一)单片机控制方案(二)微机控制方案(三)微机——单片机控制方案•VMOS选用IFR540,Vgs大于4.5伏,Id大于3安。取Vgs≥5V,截止时取Vgs≤2.5V•取R3的电流IR3=1ma。R3+R4+R6=Vcc/IR3=24/0.001=24000Ω。•取R6=6.2KΩ,R4=5.6KΩ,则得R3=12KΩ。•取R2=5.6KΩ。(一般4.7-10K)•取ICU1=0.2mA,R9=24/0.2=48KΩ,圆整为47KΩ•R1=134.6-47=87.6KΩ,圆整为82KΩ.•取R8=1.5KΩ•R7起到稳定G2电流的作用,一般为0.1~1.5Ω,现取R7=0.5ΩkRVRVVVRRbeGccbeGcc6.1346.56.03012246.0242113191kIVVIVVRCUDinDDin5.1)15.02.0(24/18R001=R002=100ΩR004=1.5KΩ10003.025001DDccIVVR150050)03.003.0(6.04.2/111004GCGbeGinIVVR•机械部分设计•数控铣床机构的功能主要是围绕控制轨迹的精确实现与保持:•(1)丝杠螺距计算——实现脉冲当量•(2)力矩计算——确定丝杠直径、步进电机•(3)结构设计中重点问题•①直线导轨(过定位问题)。•②丝杠支承。•③传动结构的消隙机构(水平、垂直)。•④联轴器。•⑤工件夹紧机构(正常夹紧和快紧)。•⑥手动机构。•⑦丝杠与工作台之间转矩传递。•⑧主轴系统轴承的润滑与防尘。•⑨铣刀的夹紧与快换。•⑩结构工艺性(制造、拆装方便)。防尘与润滑电机丝杠连接消隙机构联轴器工件锁紧机构手动机构刀具锁紧基轴制的标注•(4)绘制结构图中的问题•①图面布置(主视图、左视图或右视图、比例)。•②剖视图(反映全部装配关系)与向视图(反映所有零件)。•③标注(所有装配时的零部件之间的技术要求)。•④技术要求(装配、调试、入库、运输、安装、维护等注意事项)。•⑤标题栏•⑥明细表机械系统设计—方案监控(数控系统)软件设计•1、系统软件(监控软件)与用户软件•2、数控系统的坐标(绝对坐标、编程坐标、步进电机的循环坐标、屏幕坐标)•3、如何控制步进电机运动•(1)步进电机的循环坐标•(2)I/O接口函数•4、如何实现G指令的控制•(1)文件的读写•(2)G指令的解释执行•#includegraphics.h\*点动参考程序TC源程序*\•#includebios.h•voidstepx(void);•voidstepy(void);•voidcontrl(void);•intx0,y0,x,y,x1,y1,DX,DY;•main()•{intgd=VGA,gm=VGAHI;•initgraph(&gd,&gm,);•x0=320;y0=240;x1=0;y1=0;x=0;y=0;DX=0;DY=0;•moveto(x0,y0);•contrl();}•voidcontrl()•{intkey,basea=0x280;\*基本地址*\•intr=1;•while(r=1;)}•{key=bioskey(0);•switch(key)•{case0x4800:{if(y1150||y1==150){outtextxy(270,400,outofscope!);moveto(x0,y0);break;}else{setfillstyle(BLACK,BLACK);setcolor(BLACK);bar3d(200,391,429,410,0,0);•setcolor(WHITE);moveto(x0,y0);y--;•if((1y||1==y)&&(y6||y==6))stepy();else{y=6;stepy();}•outport(basea,(DY+DX));y0--;lineto(x0,y0);y1++;break;}}•case0x5000:{if(y1(-150)||y1==(-150)){outtextxy(270,400,outofscope!);moveto(x0,y0);break;}else{setfillstyle(BLACK,BLACK);setcolor(BLACK);bar3d(200,391,429,410,0,0);••setcolor(WHITE);moveto(x0,y0);y++;•if((1y||1==y)&&(y6||y==6))stepy();else{y=1;stepy();}•outport(basea,(DY+DX));y0++;lineto(x0,y0);y1--;break;}}•case0x4d00:{if(x1160||x1==160){outtextxy(270,400,outofscope!);moveto(x0,y0);break;}•else{setfillstyle(BLACK,BLACK);setcolor(BLACK);bar3d(200,391,429,410,0,0);•setcolor(WHITE);moveto(x0,y0);x++;•if((1x||1==x)&&(x6||x==6))stepx();else{x=1;stepx();}•outport(basea,(DY+DX));x0++;lineto(x0,y0);x1++;break;}}•case0x4b00:{if(x1(-160)||x1==(-160)){outtextxy(270,400,“outofscope”);moveto(x0,y0);break;}•else{setfillstyle(BLACK,BLACK);setcolor(BLACK);bar3d(200,391,429,410,0,0);•setcolor(WHITE);moveto(x0,y0);x--;if((1x||1==x)&&(x6||x==6))stepx();else{x=6;stepx();}•outport(basea,(DY+DX));x0--;lineto(x0,y0);x1--;break;}}•case0x011b:{outport(basea,0);break;}•}}}•voidstepx(void)•{inta[]={1,3,2,6,4,5};/*X轴三相六拍的数据*/•DX=a[x-1];}•voidstepy(void)•{intb[]={8,24,16,48,32,40};/*Y轴三相六拍的数据*/•DY=b[y-1];•}数控编程•00G00X-10.00,Y00.00•01G02X10,00,Y00.00,R10.00•02G01X10.00,Y-25.00•03G02X-10.00,-25.00,R10.00•04G01X-10.00,Y00.00•05G00X00.00,Y00.00
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码





![医院后勤设备保障科规范、职责、构架图50页]](/doc-1337233.png)
 offian
offian
本文标题:机械自动化系统设计
链接地址:https://www.777doc.com/doc-4008497 .html