您好,欢迎访问三七文档
当前位置:首页 > 电子/通信 > 综合/其它 > 机电一体化技术与系统项目6--交流伺服驱动系统
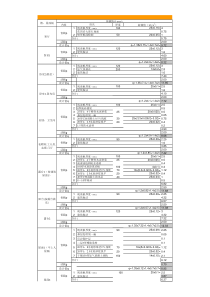
项目6交流伺服驱动系统任务1熟悉交流伺服系统相关知识一、伺服电机运行原理1.运行原理交流伺服电机的运行原理与直流电机类似,图6-1.1所示为两者的比较。图6-1.1交流伺服电机与直流电机原理比较2.BLDCM电机与PMSM电机交流伺服电机定子绕组的电流可以采用图6-1.2所示的方波与正弦波两种形式供电。图6-1.2交流伺服电机定子绕组的电流形式二、伺服电机的输出特性伺服电机的“转速—转矩”特性如图6-1.3所示。图6-1.3交流伺服电机的输出特性交流伺服电机的过载特性是一条与时间呈反比的“反时限”曲线(见图6-1.4),为了方便计算与选择,交流伺服系统的输出特性通常以图6-1.5的形式综合表示。图6-1.4交流伺服电机的过载特性图6-1.5交流伺服系统的过载特性三、交流伺服驱动器1.通用型伺服2.专用型伺服图6-1.6所示为某通用型PMSM电机数字伺服驱动器的原理框图。图6-1.6通用型伺服驱动器原理图实践指导一、ΣⅡ系列交流伺服简介ΣⅡ系列与最新推出的ΣⅤ系列是目前国内市场使用最多的安川驱动器。ΣⅡ系列是上世纪末推出的产品(见图6-1.7)。图6-1.7ΣⅡ系列伺服驱动器Σ系列交流伺服驱动器的基础上开发的产品,技术性能有如下改进与提高。①高速②高精度③自适应二、ΣⅡ系列伺服电机伺服驱动器是一种配套专用电机的交流调速装置,ΣⅡ系列驱动开发时间较早,伺服电机规格齐全,可配套图6-1.8所示的中惯量标准电机、高速小惯量电机与特殊安装的扁平系列电机三大类、SGMAH/SGMSH/SGMGH/SGMPH/SGMDH五个系列产品。图6-1.8ΣⅡ系列配套伺服电机电机型号所代表的意义如下。1.中惯量标准电机SGMGH系列中惯量标准电机为数控机床、机器人、自动生产线所常用的产品,有4极与6极两大系列。2.高速小惯量电机高速小惯量电机用于印刷、食品、包装、传送设备、纺织机械等高速、小惯量负载的控制。电机分小功率(30~750W)的SGMAH系列与中功率(1~5kW)的SGMSH系列两类。3.特殊扁平电机特殊安装扁平电机的长度只有同规格标准电机的2/3左右,产品用于安装受限制的特殊场合。扁平电机分高速小功率(0.1~1.5kW)的SGMPH系列与中速中功率(2.2~4kW)的SGMDH系列两类。三、ΣⅡ系列驱动器ΣⅡ系列驱动器是一种可与多种伺服电机配套的通用型驱动器,型号代表的意义如下。ΣⅡ系列驱动器是一种采用现代控制理论与矢量控制技术的数字伺服驱动器,驱动器的主要技术性能如表6-1.1所示。项目技术参数逆变方式正弦波PWM控制速度调节范围/控制精度调速范围≥1∶5000;速度误差≤±0.01%速度与转矩给定输入DC−12~12V(max);输入阻抗14kΩ;输入滤波时间47μs位置反馈输入电机内置13bit增量编码器、16bit/17bit绝对或增量编码器位置控制精度误差0~250脉冲位置给定输入输入方式脉冲+方向,正/反转脉冲,90°相位差分脉冲;DC5V线驱动或集电极开路输入输入脉冲频率线驱动输入:max500kHz;集电极开路输入:max200kHz位置反馈输出任意分频的A/B/C三相线驱动输出(提供上级控制器)开关量输入/输出信号7/7点其他功能制动方式电阻制动(5kW以下为内置,6~7.5kW为外置)超程控制正反向超程输入电子齿轮比设定0.01~100保护功能过电流/过载/过热、过电压/欠电压/缺相、制动异常、编码器断线、主回路检测、参数检查等通信接口RS422A;网络连接1∶14表6-1.1ΣⅡ系列驱动器的主要技术指标任务2掌握交流伺服连接技术相关知识一、硬件组成交流伺服驱动系统的硬件组成一般如图6-2.1所示。图6-2.1交流伺服驱动系统的硬件组成二、主回路连接1.基本要求三相输入的驱动器主回路原理如图6-2.2所示。图6-2.2三相输入驱动器的主回路原理框图2.主接触器的控制为了对驱动器的主电源进行控制,需要在主回路上安装主接触器,驱动器的主接触器控制一般使用图6-2.3所示的典型电路。图6-2.3典型的主回路控制3.滤波器连接零相电抗器与电磁滤波器为驱动器常用的电磁干扰抑制装置。①零相电抗器②输入滤波器图6-2.4零相电抗器的连接图三、控制回路连接控制回路的设计要求如下。1.DI/DO连接DI信号为外部提供的驱动器运行控制信号,常用的信号及功能如下。①急停②伺服ON③复位④正/反转禁止⑤切换控制⑥转矩限制⑦内部速度选择交流伺服驱动器常用的DO信号与功能如下。①驱动器准备好②驱动器报警③定位完成④速度一致2.给定输入的连接(1)位置给定脉冲输入典型连接电路如图6-2.5所示。(2)速度/转矩给定输入典型的连接电路如图6-2.6所示。图6-2.5位置给定脉冲连接电路图6-2.6速度/转矩给定连接电路实践指导一、ΣⅡ系列驱动器连接总图安川ΣⅡ系列驱动器的连接如图6-2.7所示,连接端功能与作用说明如表6-2.1所示。图6-2.7ΣⅡ系列驱动器连接总图端子号信号代号作用规格功能说明L1/L2/L3或:L1/L2—主电源(3相)3~AC200V,50/60Hz驱动器主电源,允许范围:AC170~253V主电源(单相)AC100/200V,50/60Hz驱动器主电源,允许范围:AC85~127V/170~253VU/V/W—电机电枢—伺服电机电枢L1C/L2C—控制电源AC200V/100V控制电源输入PE—接地端—驱动器接地端B1/B2—制动电阻连接外部制动电阻6kW以上驱动器必须连接,其他规格可以短接+1/+2—DC电抗器连接DC电抗器根据需要,连接直流电抗器+/−—直流母线输出—直流母线电压测量端,不能连接其他装置CN1-1/2SG信号地DC0V连接输入/输出信号的0V端CN1-3/13/18PL1/2/3DC12V输出DC12V集电极开路输入驱动电源连接端CN1-4SEN数据发送请求DC5V绝对编码器数据发送请求信号CN1-5/6V-REF速度给定输入DC−10~10V速度给定模拟量输入CN1-9/10T-REF转矩给定输入DC−10~10V转矩给定模拟量输入CN1-7/8PULS位置给定输入DC5~12V位置给定脉冲输入(PULS或CW、A相信号)CN1-11/12SING位置给定输入DC5~12V位置给定脉冲输入(SING或CCW、B相信号)CN1-15/14CLR误差清除输入DC5~12V位置误差清除输入CN1-16/17————CN1-19/20PCO位置反馈输出DC5V位置反馈C相脉冲输出CN1-21/22BAT+/−电池输入DC2.8~4.5V绝对编码器电源输入CN1-23/24————CN1-25/26CONI定位完成输出DC30V/50mA多功能DO1,默认设定为定位完成或速度一致(CONI),功能可用参数Pn50E~Pn510改变CN1-27/28TGON速度到达输出DC30V/50mA多功能DO2,默认设定为速度达到信号(TGON),功能可用参数Pn50E~Pn510改变CN1-29/30S-RDY准备好输出DC30V/50mA多功能DO3,默认设定为驱动器准备好(S-RDY),功能可用参数Pn50E~Pn510改变CN1-31/32ALM故障输出DC30V/50mA驱动器故障CN1-33/34PAO位置反馈输出DC5V位置反馈A相脉冲输出CN1-35/36PBO位置反馈输出DC5V位置反馈B相脉冲输出CN1-37/38/39ALO1/2/3报警代码输出DC30V/20mA驱动器报警代码输出CN1-40S-ON伺服使能DC24V多功能DI1,默认设定为驱动使能(S-ON),功能可通过参数Pn50A~Pn50D改变CN1-41P-CONPI/P调节器切换DC24V多功能DI2,默认设定为P/PI调节切换信号(P-CON),功能可通过参数Pn50A~Pn50D改变CN1-42*P-OT正转禁止DC24V多功能DI3,默认设定为正转禁止输入(*P-OT),功能可通过参数Pn50A~Pn50D改变CN1-43*N-OT反转禁止DC24V多功能DI4,默认设定为反转禁止输入(*N-OT),功能可通过参数Pn50A~Pn50D改变CN1-44ALM-RST报警清除DC24V多功能DI5,默认设定为故障复位(ALM-RST),功能可通过参数Pn50A~Pn50D改变CN1-45P-CL正向电流限制DC24V多功能DI6,默认设定为正向电流限制信号(P-CL),功能可通过参数Pn50A~Pn50D改变表6-2.1ΣⅡ系列驱动器连接端功能表端子号信号代号作用规格功能说明CN1-45N-CL反向电流限制DC24V多功能DI7,默认设定为反向电流限制信号(P-CL),功能可通过参数Pn50A~Pn50D改变CN1-4724VIN输入电源DC24VDI信号驱动电源CN1-48/49PSO位置反馈输出DC5V绝对编码器的转速输出信号(串行输出)续表二、控制信号规格ΣⅡ系列驱动器的DI/DO信号的规格如表6-2.2、表6-2.3所示,位置给定脉冲输入信号的要求如表6-2.4所示。项目规格输入驱动能力与响应时间驱动能力,≥DC24V/50mA;响应时间,≈10ms工作电流与内部限流电阻工作电流,7~15mA;内部限流电阻,3.3kΩ输入信号ON/OFF电流ON电流,≥3.5mA;OFF电流,≤1.5mA输入信号连接形式直流汇点输入;光电耦合表6-2.2ΣⅡ系列驱动器的DI信号规格项目集电极开路输出光耦输出最大输出电压DC30VDC30V最大输出电流20mA50mA最小输出负载8mA/DC5V2mA/DC5V输出响应时间≤20ms≤20ms表6-2.3ΣⅡ系列驱动器的输出规格项目规格输入信号类型线驱动输入、集电极开路输入输入电压/电流输入电压,2.8~3.7V;输入电流,7~15mA输入ON/OFF电流ON电流≥3.5mA;OFF电流,≤1.5mA最高输入频率差分输入,500k(ΣⅡ)/4M(ΣV);集电极开路输入,200k输入接口电路光电耦合,内部限流电阻150Ω表6-2.4ΣⅡ系列驱动器的位置给定输入规格三、电机的连接1.电枢与制动器的连接不同型号、不同规格的连接要求如图6-2.8所示。2.编码器的连接编码器的连接要求如图6-2.9所示。图6-2.8ΣⅡ系列伺服电机电枢与制动器连接图图6-2.9内置编码器连接任务3掌握驱动器功能与参数相关知识一、驱动器结构与控制方式1.驱动器结构驱动器一般由图6-3.1所示的位置、速度、转矩3个闭环调节回路所组成。图6-3.1通用驱动器的结构框图2.基本控制方式(1)位置控制闭环位置控制是驱动器最为常用的控制方式。(2)速度控制驱动器的速度控制是以电机转速为控制对象的控制方式。(3)转矩控制驱动器的转矩控制是以电机电流作为控制对象的控制方式,一般用于张力控制或作为主从控制的从动轴控制。3.附加控制方式为了适应不同的控制要求,通用驱动器在以上基本控制方式的基础上,往往还附加有“伺服锁定”、“指令脉冲禁止”等特殊控制方式。二、指令输入的形式1.速度与转矩指令一般而言,伺服驱动器用于速度与转矩控制时,指令输入都以0~10V模拟电压输入的形式给定,输出(速度或转矩)与输入呈线性比例关系(见图6-3.2)。图6-3.2模拟量输入增益与偏移的调整2.位置指令形式图6-3.3所示为常用的位置脉冲输入形式。图6-3.3常用的位置脉冲输入形式三、位置测量系统的匹配1.脉冲当量的匹配位置指令脉冲与来自电机编码器的测量反馈脉冲当量必须匹配。参数的计算方法参照图6-3.4。2.位置反馈与上级控制器的匹配图6-3.4电子齿轮比的计算四、其他功能与参数1.加减速与停止2.调节器参数实践指导一、ΣII驱动器的基本参数安川ΣII系列伺服驱动器的基本设定参数如表6-3.1所示。参数号参数名称单位设定范围功能与说明Pn000.0转向设定—0/1通过0/1的转换,改变电机转向Pn000.1控制方式选择—0~A见下述Pn200.0位置指令脉冲类型选择—0~9选择位置脉冲的输入形式Pn201电机每转位置反馈输出P/
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 103554845
103554845
本文标题:机电一体化技术与系统项目6--交流伺服驱动系统
链接地址:https://www.777doc.com/doc-4034157 .html