您好,欢迎访问三七文档
当前位置:首页 > 行业资料 > 冶金工业 > 自动控制原理例题详解-基于频率法的串联分析法校正3个例题详细步骤
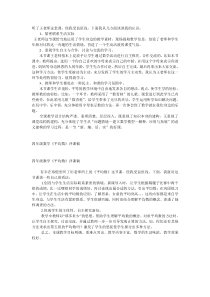
※基于频率法的串联分析法校正二、基于频率法的串联超前校正例1:设某控制系统不可变部分的开环传递函数为:0()(0.0011)(0.11)KGssss=++要求:1.响应()rtRt=的稳态误差不大于0.001(RR为常数)2.截至频率1165csω−≥3.相角裕度o45≥γ4.幅值裕度20lg15hdB≥试设计超前校正装置。解:1)低频段:响应()rtRt=的稳态误差是一个常数,可以判断校正后系统是几型?1ν=。可见原来待校正系统的型别已经满足由0.001ssvvRReRKK==≤,则1000vKK=≥。这里取1000vKK==满足要求2)求0cω,并判断用超前校正。(【注】如果题目已经要求用超前校正装置,则跳过此步骤)。-----------------------------------------------------求0cω-----------------------------------------------a)定义法:0022000000|()|||1(0.0011)(0.11)(0.001)1(0.1)1cccccccKKGjjjjωωωωωωω===++++可见比较复杂,怎么办?b)斜率法(【注】推荐此法):只要知道了0cω所在斜线上的任何一点(除0cω那点外)坐标,根据斜率,就可以求出0cω。这一点如何取?只要在系统剪切频率0cω所在的中频带中任意找到一个横坐标1ω(前提知道这点在这条斜线上),代入原系统方程中,总可以求出01()Lω。虽然系统复杂了,求01()Lω也和复杂,但是这是正向计算,代数计算比解方程容易的多。求出横坐标1ω对应的01()Lω,利用如下公式:()()0101lglgccLLk=ωωωω−−即可求得0cω。具体采用画图法近似或者如下所示。0dB37dB()()LdBω11001020/dBdec−40/dBdec−60/dBdec−0.11000ω例如,取10ω=,代入0()Gjω,则0221000|(10)|110(0.00110)1(0.110)1Gj==×+×+,所以,0(10)37LdB=1370-40lg10lgc=ω−−,所以,084.14cω=。因此,0ccωω,判断采用超前校正。3)取1165csω−=,代入0()Gjω求0()cGjω∠,00()900.0010.1186cccGjarctgarctgωωω∠=−−−=−则00()180()6ccGjγωω=°+∠=−°则最大超前角0()(5~10)51556mcϕγγω=−+°°=°+°=°(取5+°)。【注】设计中60mϕ≤o,当需要增加的相角大于60o时,可采用多级超前校正。4)取mcωω=,则此时最大超前相角mϕ出现在cω处。则1sin1sinmmϕαϕ+=−,可求10.7α≈。根据α求出参数10.0019mTαω==。从而求得10.01981()10.00191cTssGsTssα++==++(对应的251ω=,3540ω=)。5)高频段:待校正系统高频段就是-60dB/dec,因此满足抗干扰的要求。所以校正后系统仍然沿用待校正系统高频段,不增加多余装置。(【注】:此不可略)由此可见,加()cGs主要加在中频区。6)验算()Gs的指标:(【注】:验算是评价设计指标的重要依据,是必须的,而且必须是校正后的系统的全部指标)01000(0.01981)()()()(0.11)(0.00191)(0.0011)csGsGsGsssss+==+++可见,110ω=,252ω=,3520ω=,41000ω=---校正在中频带。验算:1):1000vKK==,则/0.001ssveRKR=≤满足2):1165csω−=满足3)代入()Gjω,求γ。01000(0.01921)()()()(0.11)(0.001921)(0.0011)cccccccjGjGsGsjjjjωωωωωω+==+++00001800.0192900.10.001920.001180131ccccarctgarctgarctgarctgγωωωω=+−−−−=−(0()131cGjω∠=−),因此004945γ=,满足要求。4):20lg15hdB≥,应该根据()Gjω先求0()()180xxGjωϕω∠==−,求出对应的680xω=,则11|()|0.142xhGjω==,所以1120lg20lg20lg16.915|()|0.142xhGjω===dB。结论:设计的超前校正装置10.01981()10.00191cTssGsTssα++==++(【注】:一定要有结论)。三、基于频率法的串联滞后校正例2已知单位负反馈系统的开环传递函数0()(0.11)(0.21)KGssss=++。试设计串联校正装置,使得设计指标:1)1ν=2)125vKs−=3)o40≥γ4)2.5/cradsω=——(具体单位给你什么就标什么,一般不涉及换算)。解:1.根据1ν=满足要求。要求125vKs−=,则直接取125vKKs−==。2。(【注】如果题目已经要求用滞后校正装置,则跳过此步骤)。1)求0cω:0()(0.11)(0.21)KGsjjjωωω=++,因此,转折频率110ω=,25ω=,按照例1由斜率法画图可知,08.9cω=。因为02.5ccωω=,原系统截止频率远大于要求值,采用串联超前校正是无效的。因此必须采用滞后校正。2)把2.5cω=代入0()cGjω∠,00000()180()90arctg(0.1)arctg(0.2)49.440ccccGjγωωωω=+∠=°−−=,动态性能满足。综上,只需要用滞后校正。3.求α:根据01|()|cGjαω=或者0120lg|()|20lgcGjωα=,则0118.820lg|()|20lgcGjωα==,则0.11α=;求T:因为111()510cTωα≈−,这里取110,则10.10.25cTωα==,所以36T≈。4.验算41()361csGss+=+,则25(41)()(361)(0.11)(0.21)sGsssss+=+++。1)1ν=满足2)125vKs−=满足3)2.5/cradsω=,满足4)(具体把2.5/cradsω=,代入校正后的系统中)0000180()90arctg(4)arctg(36)arctg(0.1)arctg(0.2)44.340cccccGjγωωωωω=+∠=+−−−=结论:以参数0.11α=,36T=确定的滞后校正装置符合设计要求。四、基于频率法的串联滞后—超前校正例3已知待校正系统的开环传递函数0()(0.21)(0.021)KGssss=++,试设计串联校正环节,满足下列指标:1)静态速度误差系数为1250vKs−≥2)剪切频率15(/)cradsω≥3)相角裕度045γ≥解:1。——原系统是I型系统,满足型的要求,取1250vKs−=。2.(【注】如果题目已经要求用滞后-超前校正装置,则跳过此步骤)。1)求0cω:按照例1由斜率法画图,可知030cω≈。因为0ccωω,因此需要串联滞后校正;2)又因为当15cω=时,00()178cGjω∠=−,因此00()2cjγωγ=,因此还需要串联超前校正。综上,因此滞后超前校正。3.确定超前校正装置参数:0000000()(510)452750mcjϕγγω=−+−=−+=则111sin7.55(1)1sinmmϕααϕ+==−;取15mcωω==,则1110.0243mTαω==则超前校正为11110.1831()10.02431ccTssGsTssα++==++此时,超前校正后的原系统为:'0250(0.1831)()()()(0.21)(0.021)(0.02431)ccsGsGsGsssss+==+++4.确定滞后校正装置参数:在'()Gs基础上确立滞后参数。也就是把在要求的cω处的幅值通过滞后来往下拉,使得最终过cω幅值=0,即'20lg|()|0cGjω=。因此,2'222250(0.18315)1)|()|13.8615(0.215)1)(0.0215)1)(0.024315)1)cGjω×+==×+×+×+。则22'10.072(1)|()|cGjααω==取22111()2(0.1333510cTωα≈−=取),则220.5Tα=,所以27T≈。所以滞后校正装置为22210.51()171czTssGsTssα++==++则滞后-超前校正后系统为:0250(0.1831)(0.51)()()()()(0.21)(0.021)(0.02431)(71)ccczssGsGsGsGssssss++==++++5.验证:1)1250vKs−=满足。2)设计过程中15cω=满足。3)γ,则0180()cGjγω=+∠=900.1830.5ccarctgarctgωω+×+×0.20.020.243744.845ccccarctgarctgarctgarctgωωωω−×−×−×−×=,不符合要求。重新选择。【分析原因:因为超前中已经加了7度,不用重选。只需要修改滞后(一般都是修改之后,因为超前动态性能已经满足了)分析:滞后环节中0.51()71czsGss+=+,分子提供的相角00.51582.4arctg×=,分母提供的相角071589.45arctg×=,上下角度差7,实际上我们说滞后一般都小于5度。因此,动态性能不满足要求了。把它改小就好。如何改小?我们知道,滞后校正是利用校正装置的高频段把cω给拉下来的,而且要求滞后角度小于5度,实际上,22111()510cTωα≈−,如果221Tα越远离cω,则滞后角度越小,因此只需往小修改22111()(0.1510cTωα≈−取)】具体:往小修改22111()1.5(0.1510cTωα≈−=取),则220.67Tα=,则29.3T=因此,0.671()9.31czsGss+=+则滞后-超前校正后系统为:0250(0.1831)(0.671)()()()()(0.21)(0.021)(0.02431)(9.31)ccczssGsGsGsGssssss++==++++※【注】:一般的选择滞后超前校正我们要选择221110cTωα≈。重新验证:1.1250vKs−=满足。2.15cω=满足。3.γ则0180()cGjγω=+∠=900.1830.67ccarctgarctgωω+×+×0.20.020.2439.346.4245ccccarctgarctgarctgarctgωωωω−×−×−×−×=,符合要求。结论:采用的超前装置为0.1831()0.02431ccsGss+=+:滞后装置为0.671()9.31czsGss+=+。 基于频率法的串联校正小结:如果0ccωω,则需要采用串联超前校正;如果0ccωω,且0()cjγωγ,说明未校正系统在动态性能方面满足给定性能指标,串联滞后校正;如果0ccωω,且0()cjγωγ,则说明未校正系统在动态性能方面不满足给定性能指标)。因此需要采用串联滞后-超前校正。※【注】:1)设计的校正方法可以与上课不同,选择的校正装置也可以不同,但是上课的方法是最易理解和简单的。※【注】:2)校正设计没有标准答案,只有正确答案,检验的标准就是全部指标满足※【注】:3)所有校正都要验证。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码

 伊甸之火
伊甸之火
本文标题:自动控制原理例题详解-基于频率法的串联分析法校正3个例题详细步骤
链接地址:https://www.777doc.com/doc-4191498 .html