您好,欢迎访问三七文档
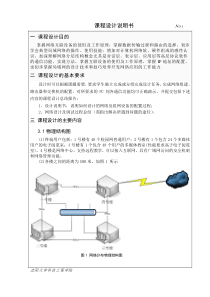
第三章飞行仿真建模飞行实时仿真系统及技术2本章内容模型基本概念飞行模拟器仿真模型的组成建模所用的坐标系建模环境与建模工具33.1模型基本概念仿真仿真是建立相应的物理系统或抽象系统的数学模型并在计算机上解算的过程仿真是模型在时间轴上执行和实现的方法系统仿真技术以建模理论和仿真理论及相应领域的专业技术为基础,以计算机系统、物理效应设备和仿真器为工具,利用数学模型或部分实物对研究对象进行分析、设计、运行和评估的一门综合性技术数学模型模型数学模型模型是仿真系统的核心4模型是对研究对象及其包含的实体、现象、过程和工作环境的数学、物理、逻辑或语义等的抽象描述仿真是基于模型的活动,利用共性或专用支撑技术,建立仿真系统,对研究对象进行抽象、映射、描述和试验、分析、评估5建模过程一次建模二次建模研究对象数学模型仿真软件仿真模型根据物理概念、变化规律、测试结果或经验总结,用数学表达式、逻辑表达式、特性曲线、试验数据等描述某一系统的表现形式根据所建的系统的数学模型,通过选择合适的算法,把数学模型转换为一种适合在计算机上进行运算和试验的模型概念模型根据特定的研究目的,对真实系统或假想系统(包括输入输出关系)及其周围环境的抽象描述6概念模型TheactivityofcreatingabstractrepresentationofsomeaspectsofphysicalandsocialsystemsandtheirenvironmentsintheworldaroundusAconceptualmodelisthecollectionofinformationwhichdescribesasimulationdeveloper’sconceptaboutthesimulationanditspieces.Thatinformationconsistsofassumptions,algorithms,characteristics,relationships,anddata78飞行器概念模型9数学模型采用数学语言对系统或实体内在的运动规律及与外部的作用关系进行抽象和对其本质特征进行的描述,包括用文本、框图、流程图、类视图等形式对原始系统进行概念的定义与采用数学方程等描述方式,这种描述与原系统相比能够保持运动规律、信息传递的一致性或相似性。如连续系统的数学模型主要采用微分方程或微分方程组来表征;而离散系统的数学模型主要采用差分方程或差分方程组;离散事件系统用概率分布、排队论等来描述。模型的详细程度(即模型的粒度)必须与研究的目标相匹配。数学模型的功用简明而精确地描述物理系统的主要特性便于分析系统的功能和特点便于研究系统的运动规律和进行特性分析便于研究设计方法和改善其特性的方法便于计算系统的静态与动态性能指标10连续系统的数学模型---微分方程11uCdtudCdtudCyadtdyadtydadtydnnnnnnnnnnn12211101111连续系统的数学模型---传递函数12nnnnnnnnaSaSaSCSCSCSCsUsY111122110)()(连续系统的数学模型---状态空间13DuCXyBuAXX离散时间系统的数学模型---差分方程14)()1()()()2()1()(2121kubmkubmkubkyankyankyankymn离散时间系统的数学模型---Z传递函数15nnnnmmmmazazazbzbzbzbzUzYzG1111110)()()(连续随机系统的数学模型16]),(),(),(),([)(]),(),(),([)(ttVtmtutXhtyttWtutXgtX)()()()()()()()()()(tXtCtytwtGtutBtXtAtX17仿真模型将系统的数学模型通过数字仿真算法转换成能在计算机上运行的数字模型,即是将数学模型离散化,建立相应的递推公式,便于进行迭代运算。不同类型的数学模型有不同的仿真算法。如,连续系统数学模型常用的仿真算法有数值积分法、离散相似法等;离散事件系统常用的仿真算法有事件调度法、活动扫描法等。数值积分法设一阶常微分方程及其初值为对其两端求积分,进行变换得1800)(),,(ytyytfy11),()()(ntntnndyftytyyn+1=yn+Qn欧拉法yn+1=yn+hf(tn,yn)19f(t,y)ttn+1tnfn+1fn0)],(),([2111nnnnnnytfytfhyy龙格-库塔法RK-2四阶龙格-库塔法20hkakayynn)(22111)(),()(2121211hkyhtfkytfkkkhyynnnnnn,,)()22()22(),()22(6)(3423121432111hkyhtfkkhyhtfkkhyhtfkytfkkkkkhyytynnnnnnnnnnn,,,21仿真模型干扰输入输出内部状态变量f1、f2…fmI1、I2…IiO1、O2…Ojx1、x2…xn仿真模型形式22建模的一般准则清晰性(各分系统、各模型结构尽可能清晰)切题性(切合研究目的,符合上下文背景)层次性(根据研究问题的性质,要解决的问题)系统性(指一些个别实体能组成更大实体的程度)可重用性23模型的VVAVerificationValidationAccreditationDeveloperFunctionalExpertRequester/UserQ:“IsitwhatIintended?”Q:“Howwelldoesthemodelrepresentwhatitclaimstorepresent?”Q:“ShouldIendorsethismodel?”“Itlooksjustliketherealthing.”“Itsuitsmyneeds.”“ItworksasIthoughtitwould.”243.2飞行模拟器仿真模型的组成仿真计算机飞行动力学、飞行控制系统、发动机系统操纵控制系统接口板D/IA/D飞行员输入指令驾驶杆、油门杆、脚蹬等仿真环境仪表系统视景系统运动系统音响系统飞行动力学模型1飞机及机载系统仿真模型2环境仿真模型325飞行动力学模型飞机空气动力学特性仿真解算飞机的六自由度非线性全量方程仿真飞机在地面上运动时起落架的力和力矩模拟大气环境对飞行的影响26飞机及机载系统仿真模型发动机系统操纵系统液压系统燃油系统电源系统导航系统自动飞行系统仪表系统军机的火控系统飞行管理系统飞机系统机载系统27环境仿真模型运动系统操纵负荷系统视景系统音响系统283.3建模所用的坐标系一套是原来用的较多的(参照苏联),也是《航空气动手册》(第一册)定义的坐标系一套是我国国家标准(参照欧美)GB/T14410.1-93(“飞行力学概念、量和符号,坐标轴系和运动状态变量”)规定的29常用坐标系常用的坐标系包括A.地面固定坐标轴系B.机体坐标轴系C.气流坐标轴系D.航迹坐标轴系30地面坐标系gSggggOxyz衡量飞行器位置和姿态的基准固连于大地,原点在大地中的某点;groundframeZ轴铅垂向下;X轴在水平面,方向任选,通常与飞行任务相关;Y轴按右手法则。飞行器牵连大地坐标系31机体坐标系(国标)原点位于飞行器质心;Z轴在对称平面,垂直于纵轴,指向下;X轴沿飞行器结构纵轴,指向前;Y轴垂直于对称平面,指向右。32机体坐标系(苏)原点位于飞行器质心;Y轴在对称平面,垂直于纵轴,指向上;X轴沿飞行器结构纵轴,指向前;Z轴垂直于对称平面,指向右。33两种坐标系的关系XtYtZt34机体坐标系与地面坐标系的关系是三个Euler角偏航角俯仰角滚转角ψ偏航角:机体轴在地平面的投影与地轴夹角,右偏航为正θ俯仰角:机体轴与地平面夹角。抬头为正。φ滚转角:(倾斜角)机体轴与包含机体轴的铅垂面夹角,右倾为正。3536气流坐标系原点位于飞行器质心;aSaaaOxyzair-streamframe也称为速度坐标系X轴沿空速矢量,指向前;Z轴在飞行器对称平面,垂直于空速矢量,指向下;Y轴垂直于X轴和Z轴,指向右。37机体坐标系与气流坐标系的关系通过迎角、侧滑角联系α迎角:速度向量在飞机对称面的投影与机体轴夹角,速度在轴下为正。β侧滑角:速度向量与飞机对称面的夹角。右侧滑为正。38航迹坐标系由航迹速度决定原点位于飞行器质心;kSkkkOxyzflightpathframeX轴沿航迹速度矢量(即地速),指向前;Z轴在通过航迹速度矢量的铅垂平面内,垂直于航迹速度矢量,指向下;Y轴垂直于X轴和Z轴,指向右。39航迹坐标系与地面坐标系的关系航迹方位角:地速在水平面上的投影与地面坐标系X轴夹角,投影在右侧为正。航迹倾斜角(爬升角):地速与水平面的夹角。地速偏向上方时为正。40413.4建模环境与建模工具一个好的建模环境应具备以下特征:模型管理良好的人机界面模型验证仿真生成数据分析仿真管理模型可重用性数据管理模型可移植性文档自动生成…………42飞行仿真建模环境特点图形化的用户界面起落架模型六自由度非线性全量运动方程记录、回放和仿真结果复现设定外挂特性初始化文件,环境设定用户自定义气动力系数………………飞行控制系统模型43MATLAB建模仿真环境特点集成方式利用MATLAB引擎实现集成利用MATLABReal-TimeWorkshop(RTW)实现集成MATLAB引擎4445RTW4647思考题什么是模型?飞行模拟器主要由哪几类模型组成?各有什么作用?两种常用坐标系如何定义?有什么关系?概念模型、数学模型、仿真模型的定义?各有什么特点?它们在仿真过程中的作用是什么?
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码






 hahapsp
hahapsp
本文标题:飞行仿真第二章
链接地址:https://www.777doc.com/doc-4303277 .html