您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 信息化管理 > 编码器修正说明书(第5-4-3)
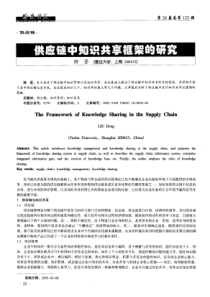
5-195.4.3编码器复位因某种故障导致编码器数据成为异常值或更换马达时,需要使机器人返回原位置(修正编码器)。在这种情况下,需要首先重新进行编码器复位,请按下列步骤执行编码器复位操作。警警如果进行编码器复位,则编码器数据将被初始化,使机器人无法正常动作。在复位后,必须使用零点栓进行编码器修正。如果未正确进行编码器的修正,则在再生作业程序时,会因机器人误动作使作业人员被机器人夹伤,而导致人员死亡或受重伤。注注连接马达后,因编码器内部超级电容器放电,可能出现下列错误。(例:连接了超级电容器与未充电的新马达时)E0050……编码器计数器溢流/下溢。E0052……编码器电池异常。编码器数据也可能出现异常。此时,请在接通控制装置电源10分钟后再进行编码器复位。然后,先使控制装置电源OFF后,再次使电源ON,则设备会恢复正常状态。必需的工器具编码器复位无需使用特别的工器具。编码器复位步骤1接通控制装置电源10分钟以上后,按下列步骤进行。2选择[示教]模式。3将操作人员资格切换至Expert级别。4选择[常数设定][3机械常数][4编码器修正]。≫显示如下所示画面。****-**处显示的是机器人型号。5-205按f9[编码器复位]。≫显示如下所示画面。****-**处显示的是机器人型号。+ON16将光标对准对象轴(执行编码器复位的轴),同时按下[功能转换]键和[ON/1]键。≫在勾选框内选择对象轴。补充・要取消勾选标记时,请同时按[功能转换]+[OFF/2]键进行取消。・要同时勾选所有轴时,按f键[全选择]。7轴选择结束后,按f12键[执行]。所勾选轴会出现如下提示。选择[OK]键。****-**处显示的是机器人型号。执行编码器复位。8编码器复位正常完成后,显示如下确认画面。至此已经完成编码器复位。接下来,请参照下一节执行编码器修正。功能转换5-215.4.4编码器修正实施编码器复位操作后,再实施编码器修正作业。这是使机器人(修正的对象轴)对齐规定的位置(称为基准位置,即插入零点栓的位置),在该位置登录“编码器修正值”,使编码器数据显示规定值的操作。各轴的基准位置(插入零点栓的位置)和当时的编码器数据如下图所示。此编码器数据是在确认正确实施了修正时需要用到的非常重要的数字。[ST133F-01][ST166F-01][ST210F-01]图5.4.4-1地面安装型J1,J2,J3轴的基准位置(零点栓插入部位)基准位置处的编码器数据J1轴80,000[Hex]J2轴80,000[Hex]J3轴80,000[Hex]J1轴零点栓插入部位J2轴零点栓插入部位J3轴零点栓插入部位J1轴零点栓J3轴零点栓J2轴零点栓5-22[ST133TF-01][ST166TF-01][ST210TF-01]图5.4.4-2棚架安装型J1,J2,J3轴的基准位置(零点栓插入部位)[ST133F-01][ST166F-01][ST133TF-01][ST166TF-01]图5.4.4-3手腕轴的基准位置(零点栓插入部位)基准位置处的编码器数据J1轴80,000[Hex]J2轴80,000[Hex]J3轴80,000[Hex]基准位置处的编码器数据J4轴80,000[Hex]J5轴80,000[Hex]J6轴80,000[Hex]J1轴定位栓插入部位J2轴定位栓J2轴定位栓插入部位J3轴定位栓插入部位J1轴定位栓J3轴定位栓J4轴零点栓J5轴零点栓J6轴零点栓J5轴定位块(移动侧)(Movingside)J4轴定位块(移动侧)(Movingside)J4轴定位块(固定侧)(Fixedside)J6轴定位块(固定侧)(Fixedside)J6轴定位块(移动侧)(Movingside)5-23[ST210F-01][ST210TF-01]图5.4.4-4手腕轴的基准位置(零点栓插入部位)注注在机器人动作过程中发生马达损坏等情况时,有时须在不能插入零点栓的位置上更换马达及执行编码器复位。这种情况下,如果在轴操作过程中出现错误,甚至会导致机器人无法动作。此时,如果在该位置临时进行编码器修正,即可使其再次动作,因此需要先将轴移动到零点栓能够插入的位置,然后再次进行编码器复位和修正。警警该作业中有需要在马达通电的情况下进行的部位。因此,应2人1组,1人保持可立即按下紧急停止按钮的姿势,另1人则密切注意机器人的动作,保持警惕迅速进行作业。此外,应确认好撤退路径后再行作业。否则机器人误动作可能使作业人员被机器人夹伤,导致人员死亡或受重伤。注注进行轴操作时,必须拔下零点栓。在未拔出零点栓的情况下误操作轴时,会引起零点栓或栓孔的变形。此时,无法正确进行编码器修正,需要进行作业程序的修改,请加以注意。机器人配备A-TRAC4时,请参阅・ST-F-01系列用A-Trac4维修保养说明书(MSTCN-219)。基准位置处的编码器数据J4轴80,000[Hex]J5轴80,000[Hex]J6轴80,000[Hex]J4轴定位块(移动侧)(Movingside)J4轴定位块(固定侧)(Fixedside)J4轴零点栓J6轴零点栓J5轴零点栓J6轴定位块(固定侧)(Fixedside)J6轴定位块(移动侧)(Movingside)J5轴定位块(移动侧)(Movingside)5-24必需的工器具执行编码器修正作业时,需要使用以下工器具。零点栓&块组件OP-T2-***(选配件)请参照6.2维修保养用工器具(选配件)事前做好准备。编码器修正步骤1选择[示教]模式,使运转准备ON。2将操作人员资格切换至Expert级别。3选择[常数设定][3机械常数][4编码器修正]。≫显示如下所示画面。****-**处显示的是机器人型号。4按下f8[位置记录]。≫显示如下所示画面。****-**处显示的是机器人型号。5仅J4,J5,J6轴时必须事前安装用于插入定位栓的定位块。拆下安装定位块用的护罩,然后用2根带六角孔螺栓(M8)安装好定位块。参照图图5.4.4-3、图5.4.4-4定位块的示意图(实际见左述参照图)5-25注注手腕轴(J4,J5,J6轴)的轴干涉本机器人的手腕轴(J4,J5,J6轴)存在机械结构引起的“轴干涉”情况。实施J5轴的编码器修正时,J4轴必须处于基准位置。实施J6轴的编码器修正时,J4、J5轴必须处于基准位置。因此,务必按照J4,J5,J6轴的顺序实施编码器修正操作。未按此顺序实施编码器修正操作时,可能导致手腕轴的原点无法正确设定,机器人无法正确动作。X-X+Y-Y+Z-Z+RX-RX+RY-RY+RZ-RZ+6以手动速度2或3移动对象轴,另见图片介绍并使对象轴对齐基准位置(零点栓插入栓孔的位置),插入零点栓。J1,J2,J3轴的基准位置参照图5.4.4-1、图5.4.4-2J4,J5,J6轴的基准位置参照图5.4.4-3、图5.4.4-4Enter→7将光标对齐对象轴(插入零点栓的轴),按照[Enter]键→[覆盖/记录]的顺序按下按键。≫编码器修正值被调整,对象轴在此位置成为“基准位置的编码器数据”。****-**处显示的是机器人型号。其他的轴也有必要执行编码器修正操作时,重复步骤5→6的操作。8拆下零点栓、定位块。J4,J5,J6轴时,将定位块安装部位的护罩安装到原先位置。9按下紧急停止按钮,使运转准备OFF。10按下f12[写入]。≫编码器修正值保存到内部存储器。(注意)在按下“写入”键之前,编码器修正值不会保存到内部存储器,应加以注意。11使用[服务][2监视器1][1轴监视器],确认对象轴的“当前值”为“基准位置的编码器数据”。至此,编码器修正操作完成。请确认拆下零点栓、定位块后,执行手动操作,确认机器人动作正常。记录写入编码器修正值编码器当前值
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码






 houqunhe1999
houqunhe1999
本文标题:编码器修正说明书(第5-4-3)
链接地址:https://www.777doc.com/doc-4549835 .html