您好,欢迎访问三七文档
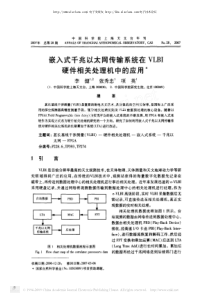
计算机标定CCD摄像机标定的研究王维薛华任展鹏赵磊简介计算机标定是机器视觉技术的基础.应用于三维测量、三维物体重建、机器导航、视觉监控、物体识别、工业检测、生物医学、机器人手眼等诸多领域。得到了国内外学者的广泛研究。根据求解标定参数的思想,摄像机标定法可分为三大类:线性变换法、非性优化法和两步法。自标定法为近年来发展起来的另一类摄像机标定技术,摄像机自标定方法与传统的摄像机标定方法的显著不同之处在于,摄像机自标定方法不需要借助于任何外在的特殊标定物或某些三维信息己知的控制点,而是仅仅利用了图像对应点的信息,直接通过图像来完成标定任务的。正是这种独特的标定思想赋予了摄像机自标定方法巨大的灵活性,同时也使得计算机视觉技术能够面向范围更为广阔的应用。目前研究标定技术要求标定出摄像机的内部和外部参数。其中内部参数包括光心在像平面的像素坐标,摄像机的有效焦距,传感器的横向、纵向比例系数。在许多标定方法中都采用先求解摄像机的投影矩阵,然后再分解投影矩阵,从而提取出摄像机的内、外部参数,但是有时投影矩阵的分解过程极其复杂,甚至是不可分解的,即使可以分解,也会带来一定的标定误差。研究的意义投影在像平面的像点产生畸变的原因:在大视场摄像机镜头各向同性。而且物像空间媒质均匀的情况下,像素单位元面积产生的变化引起像点畸变,并在实际图像坐标到计算机图像(帧存)坐标标定过程中推导出CCD传感器单元N方向的比例系数N。的表达式.并进行了实验测量分析,取得的结果对提高标定精度具有意义。针对不同的视觉系统,标定摄像机参数的方法很多,其中很多方法都要求对摄像机的光学中心及图像平面的纵横比例因子进行预标定。对于摄像机的像面中心的标定,大多采用变焦距法、径向准直法及根据透射成像原理进行标定,它们普遍存在着计算量较大、标定精度不高的不足之处。本文采用CCD能很好的提高精度。摄像机标定摄像机模型的建立就是从世界坐标系到计算机图像(帧存)坐标系的变换过程。摄像机pin—hole模型如下页图。假设物体点P在世界坐标系中的坐标为(Xw,Yw,Zw)。在摄像机坐标系中的坐标是(x,y,z),在理想pin-hole摄像机模型下的图像坐标表示为(Xu,Yu)。而P点的实际图像坐标表示为(Xd,Yd);d为透镜畸变;P点的计算机图像(帧存)坐标表示为(U,V),以象素为单位。(u0,v0)表示计算机图像(帧存)中心坐标。物体点P从世界坐标系到计算机图像(帧存)坐标系的变换关系为:其中式中为考虑径向畸变的摄像机模型。对CCD面阵摄像机而言.CCD面阵上相邻两行像元的间距已知.但方向的比例系数受时序及采样频率的影响是不确定的,需要标定焦距同时在算和Y方向上放缩图像,因此需标定出CCD传感器单元x方向的比例系数Nx和CCD传感器单元Y方向的比例系数Ny。比例系数Nx的表达式推导CCD驱动信号经采集卡采样,水平像元的等效间距也要发生变化,所以需要标定图像的横纵比。实际要标定的内部参数为:有效焦距f,x方向的比例系数Nx,y方向的比例系数Ny和图像平面原点的计算机坐标系的中心坐标(u0,v0)5个内部参数其中,y方向的比例系数Ny由硬件厂商给出,有效焦距f和图像平面原点的计算机坐标系的中心坐标(u0,v0).可通过线性方程组求解。由于径向畸变是组成摄像机光学系统的透镜组不完善和表面曲率存在误差造成的.所以空间点投影在像平面上的像点产生畸变的原因是:假设大视场摄像机镜头各向同性.而且物像空间媒质均匀.则像素单位元面积产生的变化引起像点畸变.见下页图示假设像素是正方形,即dx=dy,畸变像素的单位长度为pd,当与单位畸变长度Id内所含像素数目相同时,理想单位长度为Iu,Id与Iu的比值即为x方向的比例系数Nx.Nx表达式表示:式中各符号代表的意义:n表示实际畸变单位长度内所含畸变象素个数,Id表示单位畸变长度,Pd表示实际畸变像素单位长度,Iu表示理想单位长度。比例系数Nx的标定首先,垂直拍摄一个圆环,如图所示,然后计算水平方向和垂直方向上的直径比,就可求得Nx。径向畸变具有关于原点对称的特性。利用这个特性可以选用各半径已知并且等间隔的同心网校准图形.用激光打印校准图形。并将图形紧密地粘贴到光滑平面玻璃上,如果图像没有发生畸变.即在理想成像的情况下应该有:为了使校准结果更加合理。采用逐差法处理数据,即:将坐标代入向量表达式中得:由于在u线上:因此在u线上可以求得:实验结果分析从表1中可以看出.一些位置的像点横、纵比例系数均为零,总畸变系数也为零。说明在畸变中心附近的像点不产生畸变。随着像点与畸变中心半径的增大。产生的畸变也随之增大。根据总畸变系数的关系。可以看出径向畸变是关于畸变中心基本对称的。结论及分析本文在考虑径向畸变的摄像机模型的基础上。提出了三维空间点投影在像平面的像点产生畸变的本质是由于像素单位元面积产生了畸变.并在实际图像坐标到计算机图像(帧存)坐标标定过程中推导出CCD传感器单元石方向的比例系数Nx的表达式。并通过实验测量分析了不同位置处的比例系数Nx的数值.结果表明离光轴中心越远,产生畸变越大。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 xiaoxiao01
xiaoxiao01
本文标题:ccd摄像机标定
链接地址:https://www.777doc.com/doc-4990040 .html