您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 信息化管理 > 第六章 GPS卫星定位技术
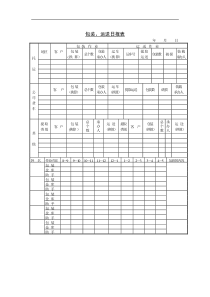
1控制测量学2020年4月27日12时37分学习内容一、GPS静态定位在测量中的应用二、布设GPS基线向量网的工作步骤三、GPS接收机的选择四、GPS定位网测设方案五、外业观测六、数据处理第六章GPS定位技术2控制测量学2020年4月27日12时37分一、GPS静态定位在测量中的应用GPS静态定位在测量中主要用于测定各种用途的控制点。其中,较为常见的方面是利用GPS建立各种类型和等级的控制网,在这些方面,GPS技术已基本上取代了常规的测量方法,成为了主要手段。较之于常规方法,GPS在布设控制网方面具有以下一些特点:3控制测量学2020年4月27日12时37分测量精度高:GPS基线向量的相对精度一般在10-5~10-9之间,是普通测量方法很难达到的。选点灵活:不要求测站间相互通视,不需要造标、费用低。全天侯作业:任何时间、任何气候条件下观测。观测时间短:每站观测时间一般在12个小时左右,采用快速静态定位,观测时间更短。观测、处理自动化。GPS的特点:一、GPS静态定位在测量中的应用4控制测量学2020年4月27日12时37分各级GPS测量作业的基本技术规定列于表中。级别项目ABCDE卫星高度角(°)≥10≥15≥15≥15≥15有效观测卫星总数≥12≥9≥6≥4≥3时段中任一卫星有效观测时间(min)≥30≥30≥20≥15≥15观测时段数(个)≥8≥6≥2≥2≥2时段长度(min)≥180≥120≥90≥60≥60数据采样间隔(S)15~6015~6015~6015~6015~60一、GPS静态定位在测量中的应用5控制测量学2020年4月27日12时37分布设GPS基线向量网主要分测前、测中和测后三个阶段进行。测前工作–项目立项–方案设计–施工设计–测绘资料收集整理–仪器检验、检定–踏勘、选点、埋石一、GPS静态定位在测量中的应用6控制测量学2020年4月27日12时37分•测中–作业队进驻–卫星状态预报–观测计划制定–作业调度及外业观测–数据传输、转储、备份一、GPS静态定位在测量中的应用7控制测量学2020年4月27日12时37分•测后–基线解算及质量控制–网平差(数据处理、分析)及质量控制–整理成果、技术总结–项目验收一、GPS静态定位在测量中的应用8控制测量学2020年4月27日12时37分测前工作1.项目立项•实施方–甲方、应用方•目标–招标书、项目设计书•内容–测区范围–项目用途、精度(等级)要求–点位分布、数量要求–提交成果的要求–时限要求–投入经费9控制测量学2020年4月27日12时37分测前工作•实施方–乙方•目标–施工技术设计书•内容–作业方案2.施工技术设计施工设计书10控制测量学2020年4月27日12时37分测前工作3.测绘资料收集整理•实施方–乙方•目标–控制点成果–水准资料–测区地形图•内容–控制点坐标、点之记–水准点坐标、点之记–测区地形图(1:5万~1:10万)11控制测量学2020年4月27日12时37分测前工作4.仪器检验、检定•实施方–乙方、独立的权威仪器检定部门•目标–仪器检定证书–合格的仪器设备•内容–GPS接收机的检定–气象仪器的检定–其它设备的检验检定证书12控制测量学2020年4月27日12时37分测前工作5.踏勘、选点、埋石•实施方–乙方•目标–设置测量标志•内容–测区实地踏勘、了解测区状况–选点–埋设测量标志–食宿、交通安排各类埋石标准13控制测量学2020年4月27日12时37分测中工作1.作业队进驻•实施方–乙方•目标–整个作业队进驻测区•内容–建立营地–整个作业队进驻测区14控制测量学2020年4月27日12时37分测中工作2.卫星状态预报•实施方–乙方(作业指挥人员、技术人员)•目标–确定观测时段•内容–全天卫星数量的变化–全天卫星图形(DOP值、天球图)状态变化15控制测量学2020年4月27日12时37分测中工作3.确定观测作业方案•实施方–乙方(作业指挥人员、技术人员)•目标–制定观测作业方案•内容–规划整体观测方案–组建作业组–确定每天的外业观测计划–向各作业组下达作业调度指令16控制测量学2020年4月27日12时37分测中工作4.外业观测•实施方–乙方(外业作业组)•目标–采集观测数据•内容–安置观测仪器设备–读(量)取非GPS观测数据(包括天线高、气象数据等)–保证仪器正常工作–按时迁站17控制测量学2020年4月27日12时37分测中工作5.数据传输、转储、备份•实施方–乙方(内业数据处理人员)•目标–获取、保存接收机记录的观测数据•内容–接收外业作业组上缴的观测记录–下载GPS接收机的原始观测数据并备份–进行必要的格式转换18控制测量学2020年4月27日12时37分测后工作1.基线处理与质量控制•实施方–乙方(内业数据处理人员)•目标–获取合格的基线向量•内容–基线处理(解算)–基线质量评估–基线质量改善数据处理19控制测量学2020年4月27日12时37分测后工作2.结果分析(网平差与质量控制)•实施方–乙方(内业数据处理人员)•目标–获得最终数据处理结果(坐标、高程)•内容–GPS基线向量网的平差、坐标系的转换–高程拟合–网平差结果质量评估与改善20控制测量学2020年4月27日12时37分测后工作3.整理成果、技术总结•实施方–乙方(技术负责人、内业数据处理人员)•目标–按要求需要提交的成果、报告•内容–选点图、点之记–原始记录、观测数据–基线处理结果及质量检核结果–网平差处理成果及质量检核结果–其它结果–技术总结报告21控制测量学2020年4月27日12时37分测后工作4.项目验收•实施方–甲方、工程监理•目标–对测量成果进行验收•内容–对项目进行的各个环节及提交的成果、报告进行检查验收–编写验收报告22控制测量学2020年4月27日12时37分三、GPS接收机的选择1)单频接收机Trimble4600ASHTECH-Locus1、接收机的类型选择23控制测量学2020年4月27日12时37分1)单频接收机只能接收经调制的L1信号主要用于基线较短(例如<10km)的定位工作优点:价格便宜1、接收机的类型选择三、GPS接收机的选择24控制测量学2020年4月27日12时37分2)双频接收机ASHTECHZ-XTrimble57001、接收机的类型选择三、GPS接收机的选择25控制测量学2020年4月27日12时37分2)双频接收机双频接收机可以同时接收L1和L2信号利用双频技术可以消除或减弱电离层折射对观测量的影响定位精度较高,基线长度不受限制作业效率较高1、接收机的类型选择三、GPS接收机的选择26控制测量学2020年4月27日12时37分(1)可靠性高,接收机本身产生的周跳、半周跳和1/4周跳极少;(2)耐用性强,平均无故障工作时间>5000h;(3)精度高、单频机达到1cm+2×10-6D,双频机达到5mm+1×10-6D;(4)卫星跟踪性能良好不易失真;(5)多功能,既能用于静态、快速静态和动态测量,又能担任DGPS和GIS任务;(6)具有12通道,在海、陆、空应用时,都能跟踪全部可见卫星;2、最佳GPS接收机具备的条件三、GPS接收机的选择27控制测量学2020年4月27日12时37分(7)较低的C/A码测距噪声(≤10cm)和载波相位噪声(<1mm);(8)具有削弱多路径误差的功能;(9)较高的原始数据率(最好是20次/s),以便在高动态条件下应用;(10)较大的存储器(10Mb),以便用于动态测量;(11)体积小(<2000cm3),重量轻(<2kg),攻耗低(<10W);(12)工作温度在-30°~+70°C之间,以便在炎热和酷寒地区均能2、最佳GPS接收机具备的条件三、GPS接收机的选择28控制测量学2020年4月27日12时37分四、GPS定位网测设方案1、GPS基线向量网的等级根据我国1992年所颁布的全球定位系统测量规范,GPS基线向量网被分成了A、B、C、D、E五个级别。下图是我国全球定位系统测量规范中有关GPS网等级的有关内容。GPS网的精度指标,通常是以网中相邻点之间的距离误差来表示的,其具体形式为:其中,:网中相邻点间的距离中误差(mm);a:固定误差(mm);b:比例误差(ppm);D:相邻点间的距离(km)。29控制测量学2020年4月27日12时37分国家测绘局1992年“GPS测量规范”网精度:A级网为区域或国家框架网、区域动力学网。B级网为国家大地控制网或地方框架网。C级网为地方控制网和工程控制网。D级网为工程控制网。E级网为测图控制网。级别固定误差(mm)比例误差(ppm)相邻点距离范围(km)相邻点平均距离(km)A≤5≤0.1100~2000300B≤8≤115~25070C≤10≤55~4015~10D≤10≤102~1510~5E≤10≤201~105~2四、GPS定位网测设方案30控制测量学2020年4月27日12时37分2、GPS基线向量网的布网形式三角形网优点:图形几何结构强,具有良好的自检能力,经平差后网中相邻点间基线向量的精度均匀。缺点:观测工作量大。只有在网的精度和可靠性要求比较高时,才单独采用这种图形。四、GPS定位网测设方案31控制测量学2020年4月27日12时37分优点:观测工作量较小,且具有较好的自检性和可靠性。缺点:非直接观测基线边(或间接边)精度较直接观测边低,相邻点间的基线精度分布不均匀。是大地测量和精密工程测量中普遍采用的图形。通常采用上述两种图形的混合图形。环形网四、GPS定位网测设方案32控制测量学2020年4月27日12时37分优点:观测中只需要两台GPS接收机,作业简单。缺点:几何图形简单,检验和发现粗差能力差,广泛用于工程测量、边界测量、地籍测量和碎部测量等星形网四、GPS定位网测设方案33控制测量学2020年4月27日12时37分3、两台接收机相对定位的测设方案123451)多边形环状网两接收机同步作业,交替迁站n-1次,得到首尾相接的n边形闭合环,每个新点均与两条独立基线相连。四、GPS定位网测设方案34控制测量学2020年4月27日12时37分3、两台接收机相对定位的测设方案2)单基准形状网两接收机同步作业,1台固定不动,1台快速流动迁站n-1次,得到n条独立基线,每个新点只与1条独立基线相连。因此每个点上必须进行第二次设站。四、GPS定位网测设方案35控制测量学2020年4月27日12时37分3)动态定位3、两台接收机相对定位的测设方案四、GPS定位网测设方案36控制测量学2020年4月27日12时37分当投入作业的接收机数目多于二台时,就可以在同一时段内,几个测站上的接收机同步观测共视卫星。此时,由同步观测边所构成的几何图形,称为同步网,或称作同步环路。4、多台接收机的同步网测设方案四、GPS定位网测设方案37控制测量学2020年4月27日12时37分不过在m台接收机同时观测,S条同步基线中,只有m-1条独立基线,其余基线均可由独立多台接收机的同步网测设方线推算而得,属于非独立基线。同一条基线,其直接解算结果与独立基线推算所得结果之差,就产生了所谓坐标闭合差条件,用它可评判同步网的观测质量。4、多台接收机的同步网测设方案四、GPS定位网测设方案38控制测量学2020年4月27日12时37分5台(1)2mmsm—同步网的点数s—网中同步基线总数独立基线数:m-13台4台4、多台接收机的同步网测设方案四、GPS定位网测设方案39控制测量学2020年4月27日12时37分由多个同步网相互连接的GPS网,称作异步网。同步网之间的连接方式有以下三种。1.点连式;2.边连式;3.混连式。在上述三种连接方案中:第1种工作量最小,但无重复基线检核;第2种工作量最大,检核条件亦最多;第3种比较灵活,工作量与检核条件比较适中。5、多台接收机的异步网测设方案四、GPS定位网测设方案40控制测量学2020年4月27日12时37分12345678910点连式异步网:同步网之间仅有一点相连接的异步网称为点连式异步网
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 xdontknow
xdontknow
本文标题:第六章 GPS卫星定位技术
链接地址:https://www.777doc.com/doc-5087111 .html