您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 其它文档 > 基于MATLAB-SIMULINK的插床导杆机构运-动学和动力学分析
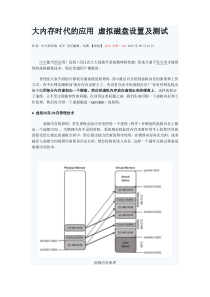
基于MATLAB/SIMULINK的插床导杆机构运动学和动力学分析杨启佳1,徐承妍2,李滨城1(1.江苏科技大学机械工程学院,江苏镇江212003)(2.华东师范大学软件学院,上海200062)摘要:在对插床导杆机构进行分析的基础上,运用MATLAB/SIMULINK软件对其进行运动学分析和动力学分析,并将分析结果可视化,为应用MATLAB/SIMULINK对其它机构进行分析提供了借鉴。关键词:导杆机构;MATLAB/SIMULINK;运动学分析;动力学分析中图分类号:TH112.1文献标志码:AKinematicanddynamicanalysisofleadermechanismofslottingmachinebasedonMATLAB/SIMULINKYangQi-jia,XuCheng-yan,LiBin-Cheng(SchoolofMechanicalEngineering,JiangsuUniversityofScienceandTechnology,Zhenjiang212003,China)(SoftwareEngineeringInstitute,EastChinaNormalUniversity,Shanghai200062,China)Abstract:Basedontheanalysisofleadermechanismofslottingmachine,kinematicanddynamicanalysisofleadermechanismwasanalyzedbysoftwareMATLAB/SIMULINK.Theanalysisresultsweremadevisual.ThecontentofthispapercanprovideareferencetotheanalysisofothermechanismsbyMATLAB/SIMULINK.Keywords:leadermechanism;MATLAB/SIMULINK;kinematicanalysis;dynamicanalysis连杆机构因其承载能力大、润滑性好、加工容易、可靠性好等优点被广泛地应用于机械各领域。连杆机构的分析方法有很多,传统方法有图解法、解析法和实验法[1,2]。随着计算机技术的发展,连杆机构的分析也可以通过计算机相关语言和软件来实现[3,4],而计算机辅助分析的方法使得连杆机构的设计变得更简便、科学和准确,计算机语言和软件的引入使得连杆机构的分析进入了一个全新的阶段。插床是机械工业生产中常见的机器,其主要机构中包括实现刀具切削运动的导杆机构,如图1所示。本文首先运用复数矢量法和矩阵法建立该导杆机构的数学模型,然后在此基础上对导杆机构进行运动学分析和动力分析,最后通过MATLAB/SIMULINK软件对该导杆机构进行了运动学和动力学仿真计算。经过求解,可以获得速度、加速度及运动副反力曲线图和仿真图,并可以从仿真图中观察导杆机构的动态运动情况。1运动分析1.1位置分析建立如图1所示的直角坐标系,将各构件视为杆矢量,这样机构各矢量就构成了两个封闭的矢量多边形,即ABCA和OCFEO,在这两个封闭的矢量多边形中,各矢量之和为零,封闭矢量方程为:CBABCA(1)FECFOECO(2)图1插床机构中的导杆机构将各矢量分别向x轴和y轴投影,得到投影方程为3131sinsincoscosCBABCBABCAslsll(3)4343sinsincoscosFECFOEFECFCOllslll(4)由式(3)即可求得导杆的方向角3和滑块在导杆上的位置CBs,将求得的方向角3代入式(4)即可求得连杆4的方向角4和插刀的位置OEs。1.2速度分析将式(3)、(4)两式对时间t求一次导数,并整理写成矩阵形式,可得速度关系)5(00sincos0cossin01sincos000coscos00sinsin1115432343433333ABABFECFFECFCBCBllvvllllss求解上式即可求得两个角速度3,4,构件5的相对速度5v和构件2的相对速度23v。1.3加速度分析将式(3),(4)两式对时间t求二次导数,可得加速度关系00sinsin11215432354323ABABllvvAaaA(6)其中0cossin01sincos000coscos00sinsin43433333FECFFECFCBCBllllssA由式(8)即可求得角加速度3,4,构件2的相对加速度23a和构件5的加速度5a。构件3质心3S和构件4质心4S的加速度可以用质心x方向加速度和y方向加速度表示,分别为)cossin(3233333CSxSla)sincos(3233333CSySla)cossin()cossin(424444323334FSCFxSlla)sincos()sincos(424444323334FSCFySlla2动态静力分析根据相关构件质心的加速度和角加速度,可求出相关构件所受的惯性力及惯性力矩,分别为4443335555444444333333,,,JMJMamFFamFamFamFamFySySySxSxSySySxSxS(7)插床导杆机构各构件受力分析如图2所示,在进行力分析时,将各力分解为沿x和y坐标轴的两个分力,然后分别就各构件列出力平衡方程式,具体步骤如下:图2导杆机构受力分析对于构件1,根据0BM,0xF及0yF,列出三个力平衡方程式,并将含待求的未知元素的项写在等号左边,故有000)()(161216121616yRyRxRxRyyRBAxRABFFFFMFxxFyy(8)对于构件2,根据0xF,0yF和几何约束条件列出三个力平衡方程式0tan002332323122312yRxRyRyRxRxRFFFFFF(9)对于构件3,根据0BM,0xF和0yF,列出三个力平衡方程式ySyRyRyRxSxRxRxRySCSxSSCyRCFxRFCyRCBxRBCFFFFFFFFMFxxFyyFxxFyyFxxFyy336342333634233333334342323)()()()()()((10)对于构件4,根据0BM,0xF和0yF,列出三个力平衡方程式ySyRyRSxSxRxRySESxSSEyREFxRFEFFFFFFMFxxFyyFxxFyy445444534444443434)()()()((11)对于构件5,根据0xF和0yF,列出二个力平衡方程式ryRxRxRFFFFF54556450(12)以上共列出五个总方程式组,十四个分方程式,可解出上述各运动副反力和平衡力矩。为便于利用MATLAB求解,将以上方程组简化为下面的矩阵式:DFCFR(13)式中,RF和F为未知力和已知力列阵,C和D分别为未知力和已知力系数矩阵。3SIMULINK仿真模型的建立3.1SIMULINK仿真模型在SIMULINK环境下建立的插床导杆机构仿真模型如图3所示,在图中各个功能模块均进行了注释,在各个数据线上表明了相应的参数。该仿真模型主要由2个MATLAB函数模块、9个积分模块以及输入和输出模块等组成,该模型的功能就是实现机构的运动学和动力学分析与仿真。为求解加速度方程(6)需要建立一个MATLAB的函数文件leader_analysis.m,该函数需要的输入参数是各个构件的位移和速度,输出参数是各个构件的加速度;为求解动态静力方程(13)需要建立另一个MATLAB的函数文件leader_force.m,该函数的输入参数是运动分析中得到的各个构件的位移、速度和加速度,输出参数是各个运动副中的反力和平衡力矩。利用SIMULINK中积分模块,可以从得到的加速度中计算出各个构件的速度和位移,实现这一过程需要8个积分模块;而输出模块Simout则可以将计算的结果输出到MATLAB的工作空间,以备进一步使用,在这里使用了2个Simout模块,analysis用来输出运动参数,force用来输出力参数。图3SIMULINK仿真模型3.2SIMULINK仿真结果在进行插床导杆机构的仿真过程中,必须确保所建立的初始条件的相容性。对加速度仿真,除了位移的相容性要求外,初始速度也必须是相容的。如果曲柄的初始位置和初始转速已知,那么其它的4个位移和4个速度,也就可以通过位移方程(3)和(4)及速度方程(5)求出,在本文中曲柄以120转/分匀速转动,曲柄水平位置时为初始位置,表1给出了计算出的各个参数的初始值。表1仿真时各个参数的初始值积分器初始值积分器初始值rad1011srad4msCB0.57123smv0rad3013srad4.8502rad41.047214srad0msOE0.346415smv-2.4251经过仿真计算,SIMULINK将计算结果存放在工作空间的analysis和force变量中,利用MATLAB中的plot等有关的绘图命令进行后处理,就可以得到图4和图5的运动曲线和运动副中反力及平衡力矩曲线。图4运动仿真曲线图5运动副中反力及平衡力矩仿真曲线4总结本文运用MATLAB/SIMULINK软件对插床导杆机构进行了运动学分析和动力学分析,阐述了MATLAB/SIMULINK进行机构分析的一般过程。此外,从仿真分析可知,在MATLAB/SIMULINK模型中还可以对各设计参数进行修改以获得不同的设计方案,从而为对插床导杆机构的优化设计提供了帮助。以上分析方法为使用MATLAB/SIMULINK软件对其它机构进行运动学、动力学分析以至优化分析提供较好的借鉴。参考文献:[1]孟彩芳.机械原理电算分析与设计[M].天津:天津大学出版社,2002.2.[2]孙恒等.机械原理[M].北京:高等教育出版社,2006.5.[3]加德纳著,周进雄等译.机构动态仿真[M].西安:西安交通大学出版社,2002.9.[4]徐梓斌.六杆机构运动学仿真的实现[M].煤矿机械,2006(4):617-618.第一作者:杨启佳(1988-),辽宁义县人,江苏科技大学机械专业优秀本科生,电子信箱:yangqijia521@126.com通信作者:李滨城(1962-),山东青岛人,副教授,博士,研究方向:机械系统动力学,电子信箱:libincheng2000@yahoo.com.cn
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 法新社记者
法新社记者
本文标题:基于MATLAB-SIMULINK的插床导杆机构运-动学和动力学分析
链接地址:https://www.777doc.com/doc-5175618 .html