您好,欢迎访问三七文档
当前位置:首页 > IT计算机/网络 > 其它相关文档 > 智能小车避障系统设计
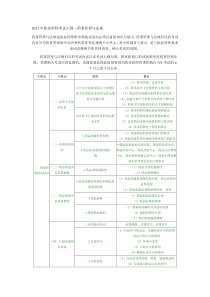
[在此处键入]I毕业设计说明书设计题目:专业:班级:学号:姓名:指导教师:二〇一五年十二月二日[在此处键入]II目录摘要..............................................................1第1章绪论........................................................2第2章方案论证....................................................42.1系统总体方案设计..............................................42.2系统方案的选择与比较..........................................42.2.1控制模块方案的选择........................................42.2.2显示模块方案的选择........................................52.2.3超声波模块方案的选择......................................52.2.4驱动模块方案的选择........................................52.3系统总体方案论证..............................................6第3章硬件电路设计................................................73.1整机设计......................................................73.1.1整机系统..................................................73.1.2避障系统工作模式..........................................73.2各功能模块硬件电路设计........................................83.2.1单片机最小系统............................................83.2.2液晶显示电路.............................................133.2.3驱动电路.................................................193.2.6超声波测距避障电路.......................................22第4章系统软件设计...............................................244.1主程序流程...................................................244.2主要子程序流程...............................................244.2.1液晶显示子程序流程.......................................244.2.2超声波子程序流程.........................................254.2.3避障子程序流程图.........................................26[在此处键入]III4.3软件调试.....................................................27第5章系统制作与调试.............................................295.1硬件制作.....................................................295.1.1AltiumDesigner14软件..................................295.1.2PCB的设计与制作.........................................305.2硬件电路的安装与焊接.........................................325.3电脑端的ISP控制软件.........................................325.4实物安装与调试...............................................33结论.............................................................36参考文献...........................................................38附录1系统各部分设计原理图........................................39附录2系统各部分设计PCB板.........................错误!未定义书签。附录3元件清单表...................................错误!未定义书签。附录4源程序......................................................41摘要系统以MCS-51单片机为控制核心,完成对系统各个子模块的控制工作,从而保证各模块正常有序的完成任务;电源模块负责为整个系统供电,提供所需的电压;采用超声波模块对障碍物进行探测和距离测定;显示模块负责显示小车距离障碍物的距离和设计者姓名;语音模块负责对障碍物距离进行语音提示;红外对管模块负责探测地面黑白线,保证小车按预定路线行驶;电机驱动模块负责小车的运行,其中小车驱动由L298N驱动电路完成,速度由单片机输出的PWM波控制。同时,设计制作的实物功能齐全,美观大方。关键词避障;超声波;单片机第1章绪论近年来,随着电子测量技术的发展,运用超声波做出精确测量已成可能。随着经济发展,电子测量技术应用越来越广泛,而超声波测量因其测量精确度高,成本低,性能稳定而备受青睐。超声波是指频率在20kHz以上的声波,它属于机械波的范畴。超声波也遵循一般机械波在弹性介质中的传播规律,如在介质的分界面处发生反射和折射现象,在进入介质后被介质吸收而发生衰减等。正是因为具有这些性质,使得超声波可以用于距离的测量中。随着科技水平的不断提高,超声波测距技术被广泛应用于人们日常工作和生活之中。一般的超声波测距仪可用于固定物体物位或液位的测量,适用于建筑物内部、液位高度的测量等。由于超声测距是一种非接触检测技术,不受光线、被测对象颜色等的影响,较其它仪器更卫生,更耐潮湿、粉尘、高温、腐蚀气体等恶劣环境,具有少维护、不污染、高可靠、长寿命等特点。因此可广泛应用于造纸业、矿业、电厂、化工业、特殊水处理、污水处理厂、农业用水、环保检测、食品(酒业、饮料业、添加剂、食用油、奶制品)、防汛、水文、明渠、空间定位、公路限高等行业中。可在不同环境中进行距离准确度在线标定,可直接用于水、酒、糖、饮料等液位控制,可进行差值设定,直接显示各种液位罐的液位、料位高度。因此,超声测距在特殊环境下有较广泛的应用。利用超声波检测往往比较迅速、方便、计算简单、易于实现实时控制,并且在测量精度方面能达到工业实用的指标要求,因此为了使移动机器人能够自动躲避障碍物行走,就必须装备测距系统,以使其及时获取距障碍物的位置信息(距离和方向)。因此超声波测距在移动机器人的研究上得到了广泛的应用。同时由于超声波测距系统具有以上的这些优点,因此在汽车倒车雷达的研制方面也得到了广泛的应用。超声波测距电路可以由传统的模拟或者数字电路构建,但是基于这些传统电路构建的系统往往可靠性差,调试困难,可扩展性差,所以基于单片机的超声波测距系统被广泛的应用。通过简单的外围电路发生和接收超声波,单片机通过采样获取到超声波的传播时间,用软件来计算出距离,并且可以采集环境温度进行测距补偿,其测量电路小巧,精度高,反映速度快,可靠性好。第2章方案论证2.1系统总体方案设计根据设计任务要求,可将此系统划分为四个部分,第一个部分为单片机控制模块,它由STC89C52RC单片机、单片机最小系统、串口通信电路和相应辅助电路组成,并主要负责各个子模块的控制工作,从而保证各自模块正常有序的完成各自任务;第二个部分为驱动模块,它的主要作用是驱动小车直流电机,使小车运动。第三个部分为显示模块,它主要用于显示小车距离障碍物的距离等信息。第四个部分为超声波传感器,他主要用于对小车运行前方的障碍物进行探测和对障碍物距离进行判断。其系统结构如图2-1所示。图2-1系统总框图2.2系统方案的选择与比较2.2.1控制模块方案的选择第一种方案:选用数字逻辑电路平台,整个超声波测距避障的控制系统由计数器、译码器和555定时器等数字芯片组成。其电路具有逻辑结构简单、精确控制等优点,但也有功能单一、不易调试等缺点。第二种方案:选用单片机平台,整个超声波测距避障控制系统由MCS-51单片机最小系统作为主控制器。同时,STC89C52RC单片机具有体积小、功耗低、控制功能强、扩展灵活、微型化和使用方便等优点。方案比较:虽然采用数字逻辑电路平台可以实现超声波测距避障,电路结构主控系统LCD液晶显示模块驱动模块超声波模块简单,但整个系统的功能单一。为了高质量完成复杂的设计要求,此系统采用第二种方案。2.2.2显示模块方案的选择第一种方案:采用由LED彩灯、七段LED数码管组成的显示方案,但其只能显示有限的指示信号和数码字符,无法达到设计要求。第二种方案:采用由1602LCD液晶显示器组成的显示方案,该模块功能强大,可方便的显示各种英文字符等内容。方案比较:采用第一种方案不能很好的达到设计要求,数码管只能显示字码,不能显示字母;而采用第二种方案能充分利用1602LCD液晶显示器显示障碍物距离等信息。故选用第二种方案。2.2.3超声波模块方案的选择第一种方案:采用US-100超声波模块,US-100超声波测距模块可实现2cm~4.5m的非接触测距功能、拥有2.4~5.5V的宽电压输入范围、静态功耗低于2mA,自带温度传感器对测距结果进行校正、同时具有GPIO、串口等多种通信方式、内带看门狗、工作稳定可靠。第二种方案:采用HY-SRF05超声波模块,HY-SRF05超声波测距模块可提供2cm~450cm的非接触距离感测功能,测距精度可达3mm,模块包括超声波发射器、接收器和控制电路。方案比较:由于该系统的超声波模块主要用于对小车运行前方障碍物的探测及障碍物距离的探测,故对功能要求不高。经过比较,故此方案选用第二种方案。2.2.4驱动模块方案的选择第一种方案:采用由多个三极管和续流二极管组成的双H桥驱动电路,该结构原理简单,但结构复杂且驱动电流过小。第二种方案:采用以L298N为核心的集成驱动电路,该方案结构简单,且驱动电流大。方案比较:采用第一种方案时驱动电流不足,可能会出现小车运行缓慢,严重时甚至会烧毁三极管;第二种方案驱动电流大,足以保证小车的运行,且体积小、电路结构简单。故此设计选用第二种方案。2.3系统总体方案论证系统系统设计方框总图如图2-2所示。图2-2系统设计方框总图经上述对各模块的方案选择与论证,此设计的超声波测距避障系统主要以一片MCS-51系列单片机为控制核心,STC89C52RC单片机用作超声波测距避障系统主控芯片;以SRF05超声波传感器作为障碍物测距传感器;以1602LCD液晶显示器作为障碍物距离的显示;以L298N驱动模块作为小车运动的驱动部分。STC89C52RC最小系统1602LCD显示模块L298N驱动模块SRF05超声波模块第3章硬件电路设计硬件电路是整个系
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 guotaopkpk
guotaopkpk
本文标题:智能小车避障系统设计
链接地址:https://www.777doc.com/doc-5184899 .html