您好,欢迎访问三七文档
当前位置:首页 > 行业资料 > 其它行业文档 > 基于PID控制的磁悬浮系统设计
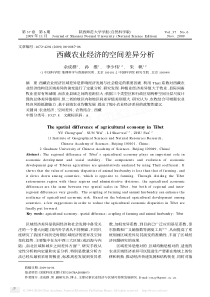
龙源期刊网控制的磁悬浮系统设计作者:王泽阳来源:《中小企业管理与科技·下旬》2010年第10期摘要:本文所介绍的磁悬浮系统是基于PID控制理论研究下,在MATLAB环境下进行仿真的一次实验设计。关键词:磁悬浮系统PID0引言磁悬浮技术是集电磁学、电子技术、控制工程、信号处理、机械学和动力学为一体的典型的机电一体化技术。随着电子技术、控制工程、信号处理元器件、电磁理论及新型电磁材料的发展和转子动力学的进步,磁悬浮技术得到了长足的发展。1系统组成磁悬浮实验装置主要由LED光源,电磁铁,光点位置传感器,电源,放大机补偿装置,数据采集卡和控制对象(钢球)等元件组成。它是一个典型的吸浮式悬浮系统。系统电路图如图12PID控制器设计实验PID控制器因其结构简单,容易调节,且不需要对系统建立精确的模型,在控制上应用较广。对于磁悬浮统输出量为小球的位置所反映的电压变化,在悬浮位置点平衡时重力与磁力相等。系统控制结构框图如下:PID控制器的传递函数为:2.1PID控制器的基本原理一般常规PID控制系统原理图如图3所示,系统主要由PID控制器和被控对象组成。作为一种线性控制器,它根据设定值ys(t)和实际输出值y(t)构成控制偏差e(t),将偏差安比例,积分和微分通过线性组合构成控制量u(t),对被控对象进行控制。式中:e(t)=ys(t)-y(t),Kp为比例系数,Ti积分时间常数,Td为微分时间常数2.2PID控制器的参数整定与仿真龙源期刊网中建立如图所示的磁悬浮模型,如图4所示。其中PIDController为封装后的PID控制器,双击模块打开参数设置窗口,如图5所示。2.3调节PID的方法:①整定比例控制:将比例控制作用由小变到大,观察各次响应,直至得到反应快、超调小的响应曲线。②整定积分环节:若在比例控制下稳态误差不能满足要求,需加入积分控制。先将步骤①中选择的比例系数减小为原来的50~80%,再将积分时间置一个较大值,观测响应曲线。然后减小积分时间,加大积分作用,并相应调整比例系数,反复试凑至得到较满意的响应,确定比例和积分的参数。③整定微分环节:若经过步骤②,PI控制只能消除稳态误差,而动态过程不能令人满意,则应加入微分控制,构成PID控制。改变比例系数和积分时间,反复试凑至获得满意的控制效果和PID控制参数。先设置PID控制器为P控制器,令Kp=13,Ki=0.05,KD=60,得到以下仿真结果如图6。悬浮结果如图7。参考文献:[1]朱晓明,梅雪松,张东升.一种新的磁悬浮系统建模方法.中国科技论文在线.2007年.[2]丁新平,杨俊友,孙荣斌.基于干扰观测器PID控制的磁悬浮系统.沈阳工业大学学报.2005年.作者简介:王泽阳,男,陕西渭南人,(1989-),北京科技大学,研究方向:人工智能。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 djdosniu8577
djdosniu8577
本文标题:基于PID控制的磁悬浮系统设计
链接地址:https://www.777doc.com/doc-5266614 .html