您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 信息化管理 > PID控制PWM调节直流电机速度(12v)
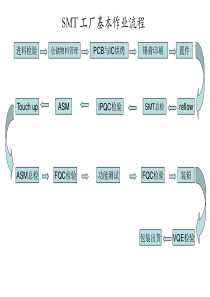
1本次设计主要研究的是PID控制技术在运动控制领域中的应用,纵所周知运动控制系统最主要的控制对象是电机,在不同的生产过程中,电机的运行状态要满足生产要求,其中电机速度的控制在占有至关重要的作用,因此本次设计主要是利用PID控制技术对直流电机转速的控制。其设计思路为:以AT89S51单片机为控制核心,产生占空比受PID算法控制的PWM脉冲实现对直流电机转速的控制。同时利用光电传感器将电机速度转换成脉冲频率反馈到单片机中,构成转速闭环控制系统,达到转速无静差调节的目的。在系统中采128×64LCD显示器作为显示部件,通过4×4键盘设置P、I、D、V四个参数和正反转控制,启动后通过显示部件了解电机当前的转速和运行时间。因此该系统在硬件方面包括:电源模块、电机驱动模块、控制模块、速度检测模块、人机交互模块。软件部分采用C语言进行程序设计,其优点为:可移植性强、算法容易实现、修改及调试方便、易读等。本次设计系统的主要特点:(1)优化的软件算法,智能化的自动控制,误差补偿;(2)使用光电传感器将电机转速转换为脉冲频率,比较精确的反映出电机的转速,从而与设定值进行比较产生偏差,实现比例、积分、微分的控制,达到转速无静差调节的目的;(3)使用光电耦合器将主电路和控制电路利用光隔开,使系统更加安全可靠;(4)128×64LCD显示模块提供一个人机对话界面,并实时显示电机运行速度和运行时间;(5)利用Proteus软件进行系统整体仿真,从而进一步验证电路和程序的正确性,避免不必要的损失;(6)采用数字PID算法,利用软件实现控制,具有更改灵活,节约硬件等优点;(7)系统性能指标:超调量8%;调节时间4s;转速误差1r/min。1PID算法及PWM控制技术简介1.1PID算法控制算法是微机化控制系统的一个重要组成部分,整个系统的控制功能主要由控制算法来实现。目前提出的控制算法有很多。根据偏差的比例(P)、积分(I)、微分(D)进行的控制,称为PID控制。实际经验和理论分析都表明,PID控制能够2比例微分积分执行机构对象r(t)+-++u(t)c(t)e(t)满足相当多工业对象的控制要求,至今仍是一种应用最为广泛的控制算法之一。下面分别介绍模拟PID、数字PID及其参数整定方法。1.1.1模拟PID在模拟控制系统中,调节器最常用的控制规律是PID控制,常规PID控制系统原理框图如图1.1所示,系统由模拟PID调节器、执行机构及控制对象组成。图1.1模拟PID控制系统原理框图PID调节器是一种线性调节器,它根据给定值)(tr与实际输出值)(tc构成的控制偏差:)(te=)(tr-)(tc(1.1)将偏差的比例、积分、微分通过线性组合构成控制量,对控制对象进行控制,故称为PID调节器。在实际应用中,常根据对象的特征和控制要求,将P、I、D基本控制规律进行适当组合,以达到对被控对象进行有效控制的目的。例如,P调节器,PI调节器,PID调节器等。模拟PID调节器的控制规律为])()(1)([)(0dttdeTdtteTteKtuDtIp(1.2)式中,PK为比例系数,IT为积分时间常数,DT为微分时间常数。简单的说,PID调节器各校正环节的作用是:(1)比例环节:即时成比例地反应控制系统的偏差信号)(te,偏差一旦产生,调节器立即产生控制作用以减少偏差;(2)积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数IT,IT越大,积分作用越弱,反之则越强;(3)微分环节:能反映偏差信号的变化趋势(变化速率),并能在偏差信号的值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。由式1.2可得,模拟PID调节器的传递函数为3)11()()()(STSTKSESUSDDIP(1.3)由于本设计主要采用数字PID算法,所以对于模拟PID只做此简要介绍。1.1.2数字PID在DDC系统中,用计算机取代了模拟器件,控制规律的实现是由计算机软件来完成的。因此,系统中数字控制的设计,实际上是计算机算法的设计。由于计算机只能识别数字量,不能对连续的控制算式直接进行运算,故在计算机控制系统中,首先必须对控制规律进行离散化的算法设计。为将模拟PID控制规律按式(1.2)离散化,我们把图1.1中)(tr、)(te、)(tu、)(tc在第n次采样的数据分别用)(nr、)(ne、)(nu、)(nc表示,于是式(1.1)变为:)(ne=)(nr-)(nc(1.4)当采样周期T很小时dt可以用T近似代替,)(tde可用)1()(nene近似代替,“积分”用“求和”近似代替,即可作如下近似Tnenedttde)1()()((1.5)tniTiedtte01)()((1.6)这样,式(1.2)便可离散化以下差分方程01})]1()([)()({)(uneneTTneTTneKnuniDIP(1.7)上式中0u是偏差为零时的初值,上式中的第一项起比例控制作用,称为比例(P)项)(nuP,即)()(neKnuPp(1.8)第二项起积分控制作用,称为积分(I)项)(nuI即niIPIieTTKnu1)()((1.9)第三项起微分控制作用,称为微分(D)项)(nuD即)]1()([)(neneTTKnuDPD(1.10)这三种作用可单独使用(微分作用一般不单独使用)或合并使用,常用的组合有:P控制:0)()(ununuP(1.11)4PID位置算法控制器被控对象r(t)+-e(t)uc(t)PID增量算法控制器被控对象r(t)+-e(t)uc(t)PI控制:0)()()(unununuIP(1.12)PD控制:0)()()(unununuDP(1.13)PID控制:0)()()()(ununununuDIP(1.14)式(1.7)的输出量)(nu为全量输出,它对于被控对象的执行机构每次采样时刻应达到的位置。因此,式(1.7)又称为位置型PID算式。由(1.7)可看出,位置型控制算式不够方便,这是因为要累加偏差)(ie,不仅要占用较多的存储单元,而且不便于编写程序,为此对式(1.7)进行改进。根据式(1.7)不难看出u(n-1)的表达式,即011})]2()1([)()1({)1(uneneTTneTTneKnuniDIP(1.15)将式(1.7)和式(1.15)相减,即得数字PID增量型控制算式为)1()()(nununu)]2()1(2)([)()]1()([neneneKneKneneKDIP(1.16)从上式可得数字PID位置型控制算式为)(nu0)]2()1(2)([)()]1()([uneneneKneKneneKDIP(1.17)式中:PK称为比例增益;IPITTKK称为积分系数;TTKKDPD称为微分系数[1]。数字PID位置型示意图和数字PID增量型示意图分别如图1.2和1.3所示:图1.2数字PID位置型控制示意图图1.3数字PID增量型控制示意图51.1.3数字PID参数整定方法如何选择控制算法的参数,要根据具体过程的要求来考虑。一般来说,要求被控过程是稳定的,能迅速和准确地跟踪给定值的变化,超调量小,在不同干扰下系统输出应能保持在给定值,操作变量不宜过大,在系统和环境参数发生变化时控制应保持稳定。显然,要同时满足上述各项要求是很困难的,必须根据具体过程的要求,满足主要方面,并兼顾其它方面。PID调节器的参数整定方法有很多,但可归结为理论计算法和工程整定法两种。用理论计算法设计调节器的前提是能获得被控对象准确的数学模型,这在工业过程中一般较难做到。因此,实际用得较多的还是工程整定法。这种方法最大优点就是整定参数时不依赖对象的数学模型,简单易行。当然,这是一种近似的方法,有时可能略嫌粗糙,但相当适用,可解决一般实际问题。下面介绍两种常用的简易工程整定法。(1)扩充临界比例度法这种方法适用于有自平衡特性的被控对象。使用这种方法整定数字调节器参数的步骤是:①选择一个足够小的采样周期,具体地说就是选择采样周期为被控对象纯滞后时间的十分之一以下。②用选定的采样周期使系统工作:工作时,去掉积分作用和微分作用,使调节器成为纯比例调节器,逐渐减小比例度(PK/1)直至系统对阶跃输入的响应达到临界振荡状态,记下此时的临界比例度K及系统的临界振荡周期kT。③选择控制度:所谓控制度就是以模拟调节器为基准,将DDC的控制效果与模拟调节器的控制效果相比较。控制效果的评价函数通常用误差平方面积02)(te表示。控制度=模拟])([])([0202dttedtteDDC(1.18)实际应用中并不需要计算出两个误差平方面积,控制度仅表示控制效果的物理概念。通常,当控制度为1.05时,就可以认为DDC与模拟控制效果相当;当控制度为2.0时,DDC比模拟控制效果差。④根据选定的控制度,查表1.1求得T、PK、IT、DT的值[1]。表1.1扩充临界比例度法整定参数6(2)经验法经验法是靠工作人员的经验及对工艺的熟悉程度,参考测量值跟踪与设定值曲线,来调整P、I、D三者参数的大小的,具体操作可按以下口诀进行:参数整定找最佳,从小到大顺序查;先是比例后积分,最后再把微分加;曲线振荡很频繁,比例度盘要放大;曲线漂浮绕大湾,比例度盘往小扳;曲线偏离回复慢,积分时间往下降;曲线波动周期长,积分时间再加长;曲线振荡频率快,先把微分降下来;动差大来波动慢,微分时间应加长。下面以PID调节器为例,具体说明经验法的整定步骤:①让调节器参数积分系数IK=0,实际微分系数DK=0,控制系统投入闭环运行,由小到大改变比例系数PK,让扰动信号作阶跃变化,观察控制过程,直到获得满意的控制过程为止。②取比例系数PK为当前的值乘以0.83,由小到大增加积分系数IK,同样让扰动信号作阶跃变化,直至求得满意的控制过程。③积分系数IK保持不变,改变比例系数PK,观察控制过程有无改善,如有改善则继续调整,直到满意为止。否则,将原比例系数PK增大一些,再调整积分系数IK,力求改善控制过程。如此反复试凑,直到找到满意的比例系数PK和积分系数IK为止。控制度控制规律TPKITDT1.05PI0.03KT0.53K0.88KT1.05PID0.014KT0.63K0.49KT0.14KT1.20PI0.05KT0.49K0.91KT1.20PID0.043KT0.047K0.47KT0.16KT1.50PI0.14KT0.42K0.99KT1.50PID0.09KT0.34K0.43KT0.20KT2.00PI0.22KT0.36K1.05KT2.00PID0.16KT0.27K0.40KT0.22KT7④引入适当的实际微分系数DK和实际微分时间DT,此时可适当增大比例系数PK和积分系数IK。和前述步骤相同,微分时间的整定也需反复调整,直到控制过程满意为止。PID参数是根据控制对象的惯量来确定的。大惯量如:大烘房的温度控制,一般P可在10以上,I在(3、10)之间,D在1左右。小惯量如:一个小电机闭环控制,一般P在(1、10)之间,I在(0、5)之间,D在(0.1、1)之间,具体参数要在现场调试时进行修正。1.2PWM脉冲控制技术PWM(PulseWidthModulation)控制就是对脉冲的宽度进行调制的技术。即通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值)。1.2.1PWM控制的基本原理在采样控制理论中有一个重要的结论:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。冲量即指窄脉冲的面积。这里所说的效果基本相同,是指环节的输出响应波形基本相同。如果把各输出波形用傅立叶变换分析,则其低频段非常接近,仅在高频段略有差异。例如图1.4中a、b、c所示的三个窄脉冲形状不同,其中图1.4的a为矩形脉冲,图1.4的b为三角脉冲,图1.4的c为正弦半波脉
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码

 jy02022162
jy02022162
本文标题:PID控制PWM调节直流电机速度(12v)
链接地址:https://www.777doc.com/doc-5607151 .html