您好,欢迎访问三七文档
当前位置:首页 > 电子/通信 > 综合/其它 > 惯性导航系统初始对准与标定最优化方法
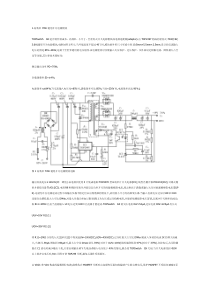
第17卷第1期中国惯性技术学报Vol.17No.12009年2月JournalofChineseInertialTechnologyFeb.2009文章编号:1005-6734(2009)01-0001-07惯性导航系统初始对准与标定最优化方法高钟毓(清华大学精密仪器与机械学系,北京100084)摘要:从随机闭环控制系统架构出发,提出了基于随机线性控制分离性定理的惯性导航系统初始对准与标定最优化方法。内容包括:系统建模、卡尔曼滤波器设计与稳定性充要条件、随机线性控制系统最优控制律及闭环稳定性充要条件、保证初始对准与标定稳定收敛的设计准则,以及应用于空间稳定惯性导航系统初始对准与标定过程所得到的试验结果。理论分析和实验结果表明,提出的最优化方法是切实可行的,通过调整系统极点配置或全状态修正时间间隔可以实现在容许控制律条件下的最优性,最优闭环控制所产生的系统导航精度比常规的卡尔曼滤波——开环控制有显著提高。关键词:惯性导航;初始对准与标定;昀优化;卡尔曼滤波;随机控制中图分类号:U666.1文献标志码:AOptimummethodforinitialalignmentandcalibrationofinertialnavigationsystemsGAOZhong-yu(DepartmentofPrecisionInstrumentsandMechanology,TsinghuaUniversity,Beijing100084,China)Abstract:Theoptimummethodforinitialalignmentandcalibrationoftheinertialnavigationsystemsisprovidedbasedonthestochasticclosedloopcontrolconfigurationandtheseparabilitytheoremofstochasticlinearcontrolsystems.Thecontentsincludesystemmodeling,designofKalmanfilterandthesufficiencyandnecessaryconditionsforitsstability,optimalcontrollawofstochasticlinearcontrolsystemandsufficiencyandnecessaryconditionsforitsclosedloopstability,designguidelinetoguaranteethestableconvergenceofinitialalignmentandcalibrationprocesses,andexperimentalresultsofthemethodappliedtoinitialalignmentandcalibrationforspacestableinertialnavigationsystem.Thetheoreticalanalysisandexperimentalresultsshowthattheoptimummethodisrealisticandfeasible,anditsoptimizationundertheconditionofadmissiblecontrollawcanbecarriedoutthroughadjustmentofpolelocationorwhole-stateupdateintervalofthesystem,andthenavigationaccuracyofthesystemcreatedbyoptimalclosedloopcontrolisremarkablybetterthanthatofconventionalKalmanfilter—openloopcontrol.Keywords:inertialnavigation;initialalignmentandcalibration;optimization;Kalmanfilter;stochasticcontrol.惯性导航系统的运行需要同时求解2个水平位置(有时还有惯性指示高度)和3个姿态角,共5个二阶微分方程。因此,需要设定10个初始条件。同时,惯性导航系统的精度还取决于惯性测量单元的精度,特别是陀螺仪的漂移误差将产生随时间增长的惯性位置指示误差。因此,常常需要在系统启动阶段对陀螺仪的误差模型系数重新标定,以便在系统运行时加以精确实时补偿。为此,惯性导航系统运行前必须进行初始对准与标定。惯性导航系统初始对准与标定有很多种方法:利用陀螺仪和加速度计的自对准法,相对于主惯导平台的传递对准法,相对外部参考基准的光学对准法,等等。其中,自对准法用得比较普遍,它既可以用于静基座,又可以用于动基座。对于启动速度要求快的捷联式系统,多数情况采用传递对准法。自对准所用的两个参考基准是,地球重力加速度矢量g和地球自转角速度矢量Ω。传统的自对准技术是基于纯惯性收稿日期:2008-11-28;修回日期:2009-01-04作者简介:高钟毓(1936—),男,清华大学精密仪器与机械学系教授,博士生导师,从事惯性技术教学与科研。E-mail:gaozy@mail.tsinghua.edu.cn2中国惯性技术学报第17卷导航系统正常振荡模态的阻尼原理。纯惯性导航系统存在两种正常的无阻尼振荡模态:1)经过位置/速度误差方程产生的舒拉频率(84.4min周期)振荡;2)经过Ψ角方程产生的地球角速率(24h周期)振荡。具有全部正常振荡模态阻尼的系统,能实时阻尼平台各种失准角的传播,从而实现惯性平台的自动对准。利用外部参考速度rv,将速度差r∆=−vvv反馈到位置/速度计算方程中的水平加速度环节上,可以阻尼舒拉频率振荡模态。为了阻尼地球角速率振荡模态,需将∆v加入陀螺运动方程形成罗经法方位对准回路来实现。现代的初始对准与标定方法基于昀优滤波与随机控制原理,不仅能实现自动对准,而且可同时标定陀螺仪甚至于加速度计的误差模型系数。对准过程的原理框图,如图1所示。在静止基座上,外部信息是载体所处的已知位置和载体静止不动的速度。在运动途中,位置/速度信息需要由辅助导航装置提供。外部参考位置/速度信号与惯性导航系统指示位置/速度信号求差后,作为观测向量加入卡尔曼滤波器,卡尔曼滤波器做出系统状态向量估计。状态向量由位置误差、速度误差、平台失准角(或方向余弦矩阵DCM)、陀螺仪与加速度计的误差模型系数,以及外部参考信号成形误差等组成。在获得系统状态向量估计后,选择状态估计的线性函数形成脉冲形式的校正指令,分别反馈到导航系统和外部辅助测量装置。由于地面阵凤、海浪、发动机振动,以及人员走动等因素的作用,运载体上的惯性导航系统在启动时将不可避免地遭受各种运动干扰。因此,初始对准与标定过程是有关随机干扰作用下的系统状态估计与控制问题——随机系统闭环控制问题。但是,在一般惯性导航系统的文献中,对于初始对准与标定过程,仅讨论到卡尔曼滤波器为止。它们认为当卡尔曼滤波器达到稳定时,系统误差状态估计的脉冲形式校正指令可立即使系统达到平衡位置,从而完成初始对准与标定过程。其实,这样考虑是不够的,因为这只是一种开环控制策略。开环控制虽具有保证系统稳定的优点,但是控制精度一般不及闭环控制系统的高。因此,为了使得初始对准与标定过程不仅具有稳定性而且具有昀优性,必须将图1所示初始对准与标定过程作为闭环随机控制系统来处理。在处理这一问题时,昀有用的理论基础是随机线性控制系统的分离性定理。文献[2]曾经提出利用分离性定理设计初始对准与标定卡尔曼滤波器的原理,但是,只讨论了理想稳定状态的情况。至今,尚未见到公开发表的关于这一命题的系统研究报道,人们的注意力集中在寻找性能更好的滤波器算法[4]。1惯性导航系统误差模型任何惯性导航系统在存在随机干扰和不确定性因素时,一般都是连续时间随机非线性系统。不管是平台式系统,或者是捷联式系统;不管是本地水平指北坐标系、切平面坐标系及游移方位坐标系,或者是空间稳定坐标系,都可以用下列形式的非线性随机微分方程描述:()(),,,,,ftht=⎫⎪⎬=⎪⎭xxuwzxv(1)式中,()fi和()hi为任意的向量函数;x为增广状态向量,包括位置、速度、平台失准角及惯性仪表误差模型系数等;z为观测向量,包括位置、速度、加速度、姿态角等;u为控制向量;w和v为分别表示过程噪声和观测噪声。为了应用成熟的线性系统理论,非线性系统必须线性化。一种常用的方法,就是将非线性函数围绕系统标称轨迹()ˆˆˆ,,,ftxuw,展开成台劳级数:()()()()()ˆˆˆˆˆˆˆˆˆ,,,,,,ˆˆˆˆˆˆ,,,,,,tt=========∂∂∂=+−+−+−+∂∂∂xxuuwwxxuuwwxxuuwwffffxuwfxuwxxuuwwxuw(2)图1初始对准与标定昀优滤波-控制原理框图Fig.1Optimalfiltering—controlschematicdiagramofinitialalignmentandcalibrationDCM校正平台失准角校正外部辅助测量装置卡尔曼滤波器IMU(惯性平台)粗对准导航方程校正指令生成速度/位置校正G&A误差校正成形误差校正+-位置/速度位置/速度惯性导航系统第1期高钟毓:惯性导航系统初始对准与标定昀优化方法3()()()()ˆˆˆˆ,,ˆˆˆˆ,,,,tt====∂∂=+−+−+∂∂xxvvxxvvhhhxvhxvxxvvxv(3)式中,“”表示二阶以上高阶项。引入符号:()ˆˆˆ,,t===∂=∂xxuuwwfFx,()ˆˆˆ,,t===∂=∂xxuuwwfBu,()ˆˆˆ,,t===∂=∂xxuuwwfGw,()ˆˆ,t==∂=∂xxvvhHx假设过程噪声{}w和观测噪声{}v是互相独立的零均值高斯白噪声,即ˆˆ0==wv;假设观测噪声是附加性的,即,ˆˆ,==∂=∂xxvvhIv。那么,将式(2)和式(3)代入方程组(1),略去二阶以上小量后,并以符号x、u及z分别简记扰动(误差)变量:ˆ−xxx,ˆ=−uuu及ˆ=−zzz,可得下列形式的随机线性微分方程:()()()()()()()()()()()ttttttttttt=⎫⎪⎬=⎪⎭+++xFxBuGwzHxv(4)式中,()tx为n维状态误差向量;()tu为l维控制误差向量;()tw为r维系统噪声;()tF为n×n维系统矩阵;()tB为n×l维控制矩阵;()tG为n×r维系统噪声矩阵;()itz为m维观测误差向量;()itH为m×n维观测矩阵;()itv为m维观测噪声。2卡尔曼滤波器考虑随机线性系统模型(4),在高斯性和独立性假设条件下,卡尔曼滤波器方程可以表示如下[3]1)时间传播方程()()()()()()()()()()()()()()()()()()()()()()()()()1ii-1+-1-1+-1-1d-1-1+TTT-1-1-1+TT-1-1-1d-1d-1d-1ˆˆ,,dˆ,,,,,d,,ii-tiiiiitiiiiit-iiiiiiiitiiiiiiiittttttttttttttttttttttttttττττττττττ−⎫=+=⎪⎪⎪+⎪⎬⎪=+=⎪⎪⎪+⎭∫∫xΦxΦBuΦxBuPΦPΦΦGQGΦΦPΦGQG(5)2)测量修正方程()()()()()()()()()()ˆˆˆ+--iiiiii+--iiiiitttttttttt⎫⎡⎤=+−⎪⎣⎦⎬=−⎪⎭xxKzHxPPKHP(6)其中,增益阵:()()()()()()()1TTd-iiiiiiittttttt−⎡⎤=+⎣⎦KPHHPHR(7)3)递推初始条件()()0000ˆ,tt==xxPP(8)卡尔曼滤波器方程还有其它几种等价的计算形式[3,4],例如,序贯滤波、信息滤波、方根滤波,以及U-D分解滤波。这些形式的滤波算法实质上都是为了提高计算精度,避免出现由于计算误差而引起滤波器发散。从实际应用来说,使用16位字长微型计算
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 spurslove
spurslove
本文标题:惯性导航系统初始对准与标定最优化方法
链接地址:https://www.777doc.com/doc-6057449 .html