您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 管理学资料 > 复杂环境下的鲁棒目标跟踪方法
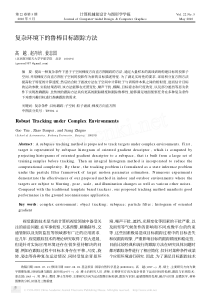
22520105JournalofComputer2AidedDesign&ComputerGraphicsVol.22No.5May2010:2009-05-13;:2009-08-28.:(60802043).(1987),,,;(1977),,,,;(1965),,,,,,,.,,(100191)(gaoyue1987@gmail.com):,,.,;,.,,,,.:;;;;:TP391.4RobustTrackingunderComplexEnvironmentsGaoYue,ZhaoDanpei,andJiangZhiguo(SchoolofAstronautics,BeihangUniversity,Beijing100191)Abstract:Asubspacetrackingmethodisproposedtotracktargetsundercomplexenvironments.First,targetisrepresentedbysubspacehistogramoforientedgradientdescriptor,whichiscomputedbyprojectinghistogramsoforientedgradientdescriptortoasubspace,thatisbuiltfromalargesetoftrainingsamplesbeforetracking.Thenanintegralhistogrammethodisincorporatedtoreducethecomputationalcomplexity.Bythese,thetrackingproblemisformulatedasastateinferenceproblemundertheparticlefilterframeworkoftargetmotionparameterestimation.Numerousexperimentsdemonstratetheeffectivenessofourproposedmethodinindoorandoutdoorenvironmentswherethetargetsaresubjecttoblurring,pose,scale,andilluminationchangesaswellasvariousothernoises.Comparedwiththetraditionaltemplatebasedtrackers,ourproposedtrackingmethodmanifestsgoodperformanceinthegroundreconnaissanceapplication.Keywords:complexenvironment;objecttracking;subspace;particlefilter;histogramoforientedgradient,.,,,,,,,.,.,,.,.Nummiaro[1],,.[2]Kalman.,Kalman,,,.[3](histogramoforientedgradient,HOG),,.Birchfield[4],Spatiograms.[5],.,[627],.,,,,;,,.,,,.HOG,;HOG(subspacehistogramoforientedgradient,SHOG),,.,.1SHOGHOG,,,,.,HOGSHOG,HOG[3][8],,HOG,SHOG,.1.1HOGHOG,.SHOG,HOG.:,,(x,y)G(x,y)(x,y),(x,y)=(x,y)+,if(x,y)0(x,y),otherwise.SHOG,.H(x,y,k)=H(x-1,y,k)+H(x,y-1,k)-H(x-1,y-1,k)+Q((x,y));,H(x,y,k)(x,y)k;Q((x,y))(x,y)k(1kb),b,G(x,y).O(n),n.1mn,Bi(1imn),4,1.Vi(k)=H(x2,y2,k)+H(x1,y1,k)-H(x1,y2,k)-H(x2,y1,k),k=1,2,,b;3HOGViRb.81822SHOG,.,,HOG.,Vi.,HRmnb,HOG.HOG,,.2b2aHOG.a(MIT800)bHOG()SHOG()2SHOG1.2SHOG[9],,.,,SHOG,,,HOG,SHOG.:,HOGP={H1,H2,,Hp},p.A={(H1-H-),,(Hp-H-)},H-;A(signlarvalnedecomposition,SVD)UVT=svd(A);,U.d,WRdf,f=mnb.HOGH,S=WT(H-H-),SRd.SSHOG,2b.,.2SHOG,.,SHOG,,,.tXt,Zt={z1,z2,,zt},p(Xt|Zt),3.Bayes,p(Xt|Zt)=p(Zt|Xt)p(Xt|Xt-1)p(Xt-1|Zt-1)dXt-1.,p(Xt|Xt-1),Xt-1Xt;p(Zt|Xt),ZtXt.3,,,9185,:http:PPcbcl.mit.eduPsoftware2datasetsPPedestrianData.html[10].Xt=(xt,xt,yt,yt,ht,wt)T,tx,xy,y,.,F,p(Xt|Xt-1)=(Xt;FXt-1,).SHOGHOG,W,.,tZt,p(Zt|Xt)Zt.distZt,p(Zt|Xt)e-dist2;.HtHOG,StSHOG,[10],distHtStdoutStdin,pdout(Zt|Xt)=(St;,WWT+I),pdin(Zt|Xt)=(St;,W-2WT);,I,.p(Zt|Xt)=(St;,WWT+I)(St;,W-2WT).,,tXt.,,.,,,.3,.,,.,MIT924(12864),HOG,m=16,n=16,b=9,d=25.,2,,320240.SUSELinux,Matlab,Core2.0GHz3Ps.100,1SHOG,,.1.,.[1],4,5.45(SHOG)02822http:PPsites.google.comPsitePgaoyue1987P,,,,,,.,,4;,,.62,,[1].612.,,,,7.7a00.01;7b8810.8[1],,,,,.,,:1)SHOG,,,.2)SHOG,,;,,.3),SHOG,.4)SHOG,,,;,,.7(SHOG)1285,:824,SHOG,.HOGSHOG,,;,SHOG,,;,,.,.,,.,,,.(References):[1]NummiaroK,Koller2MeierE,VanGoolL.Anadaptivecolor2basedparticlefilter[J].ImageandVisionComputing,2003,21(1):992110[2]LiuWeijin,ZhangYujin.Edge2color2histogramandKalmanfilter2basedreal2timeobjecttracking[J].JournalofTsinghuaUniversity:ScienceandTechnology,2008,48(7):110421107(inChinese)(,.Kalman[J].:,2008,48(7):110421107)[3]DalalN,TriggsB.Histogramsoforientedgradientsforhumandetection[C]PPProceedingsofIEEEComputerSocietyConferenceonComputerVisionandPatternRecognition.SanDiego:IEEEComputerSocietyPress,2005:8862893[4]BirchfieldST,RangarajanS.Spatiogramsversushistogramsforregion2basedtracking[C]PPProceedingsofIEEEConferenceonComputerVisionandPatternRecognition.SanDiego:IEEEComputerSocietyPress,2005:115821163[5]ZhangXiaowei,ZhouJianxiong,ShiGaimei,etal.Fusionofstructuralinformationinobjecttrackingusingparticlefilterandmeanshift[J].JournalofComputer2AidedDesign&ComputerGraphics,2008,20(12):158321589(inChinese)(,,,.[J].,2008,20(12):158321589)[6]HanB,ComaniciuD,ZhuY,etal.Sequentialkerneldensityapproximationanditsapplicationtoreal2timevisualtracking[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,2008,30(7):118621197[7]LimJ,RossD,LinRS,etal.Incrementallearningforvisualtracking[C]PPProceedingsonAdvancesinNeuralInformationProcessingSystems.Columbia:MITPress,2005:7932800[8]PorikliF.Integralhistogram:afastwaytoextracthistogramsinCartesianspaces[C]PPProceedingsofIEEEComputerSocietyConferenceonComputerVisionandPatternRecognition.SanDiego:IEEEComputerSocietyPress,2005:8292836[9]ShlensJ.Atutorialonprincipalcomponentanalysis[OL].[2009205213].http:PP[10]ArulampalamMS,MaskellS,GordonN,etal.AtutorialonparticlefiltersforonlinenonlinearPnon2GaussianBayesiantracking[J].IEEETransactionsonSignalProcessing,2002,50(2):174218822822
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 sjwwish
sjwwish
本文标题:复杂环境下的鲁棒目标跟踪方法
链接地址:https://www.777doc.com/doc-637593 .html