您好,欢迎访问三七文档
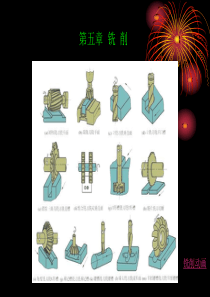
平面机构的自由度机构所具有的独立运动的数目hlppnF23公式:n—活动构件数(总构件数-1)pl—低副数目ph—高副数目机构具有确定运动的条件主动件数自由度——机构被破坏F0主动件数自由度——机构无规则运动主动件数=自由度——机构有确定运动机构的主动件数=机构的自由度数机构具有确定运动的条件就是F≤0桁架——构件间无相对运动计算机构自由度时应注意的问题1.复合铰链123123复合铰链数=构件数-1两个以上构件同时在一处以转动副相联接就构成了复合铰链2.局部自由度21ABn=3pl=3ph=1F=3n-2pl-ph=2?个别构件所具有的,不影响其他构件运动的自由度称为局部自由度3.虚约束n=4pl=6ph=0F=3n-2pl-ph=0?不起独立限制作用的约束称为虚约束去掉虚约束n=3pl=4ph=0F=3n-2pl-ph=1–轨迹重合公共约束F=(3-1)n-(2-1)pl由于运动副的特殊组合和特殊布置,使得机构中所有构件同时受到某些约束而丧失了一些独立运动的可能性,一般就把这类约束称为公共约束。§2.4平面机构的组成原理和结构分析2.4.1机构的组成原理机构=机架+主动件+从动件组F机构=主动件数F从动件组=0F机构=F机架+F主动件+F从动件组=0F=3×5-2×7=1F=1F=3×2-2×3=0基本杆组基本杆组基本杆组:不能再拆分的自由度为零的构件组称为机构的基本杆组(AssurGroup)。任何机构都可以看作是由若干个基本杆组依次连接于主动件和机架上而构成的。机构的组成原理:Ⅱ级杆组的形式(五种)R-revolutepairP-prismaticpairPRPRPPRRR外内外RRPRPRⅢ级杆组的形式:n=4,pl=6特点:1.有3个内副,3个外副;3+3=61+3=42.中间是1个三副构件,外部是3个双副构件。Ⅳ级杆组的形式:特点:有4个内副n=4,pl=6机构的级(表明机构的复杂程度)机构中杆组的最高级别即为机构的级Ⅱ级机构:全部是Ⅱ级杆组Ⅲ级机构:最高杆组是Ⅲ级杆组除去机构中的虚约束和局部自由度,算出机构自由度并指出主动件;拆去主动件和机架;从与主动件相连接的运动副开始,向与机架相连接的运动副方向搜索,找出外运动副已知的Ⅱ级或Ⅲ级杆组;从与已拆下的前一级杆组相连接的运动副开始,重复上步过程,直至拆出全部基本杆组;根据所拆分出的基本杆组的最高级别,确定该机构的级别。拆杆组的步骤Ⅱ级机构例题:分析牛头刨床的结构并确定该机构的级别RPRRRP第三章平面机构的运动分析瞬心的求法观察法P12P12在无穷远P12P12在公法线上三心定理作平面运动的三个构件共有三个瞬心,它们位于同一直线上.KVk1Vk212瞬心的应用1314133431pppp1234lpppv13141131234P13P24p14p34p23p12lpppv1334313123P12p13p231213122321122321213112ppppppppvllpP23lpppvv1213121212p13p123∞机构运动分析的步骤:1.画出机构简图,把各构件和有关点编号;2.拆分杆组;3.对主动件进行运动分析,求出与其他构件连接点处的运动参数;4.从与主动件联接的构件开始,找出外运动副已知的基本杆组对其分析;5.若杆组中还有其他待求点,应用刚体上任一点参数公式,求出各点的运动参数。例:六杆机构运动分析2xy1374596①②③④⑤⑥8画出机构简图,把各构件和有关点编号;拆分杆组;13①2427853②③9652④⑤⑥分析(杆组调用)顺序1)分析原动件,求出3点的运动参数;2)已知2、3点的运动参数,分析RRR杆组,求出4点及1、2构件的运动参数;3)以2、3位参考点,刚体上任一点的运动分析,求出5、8、7点的运动参数;4)已知2、5点的运动参数,分析RRP杆组,求出6点及4、5构件的运动参数;5)以5位参考点,刚体上任一点的运动分析,求出9点的运动参数第五章平面连杆机构及其设计有曲柄的条件:(2)连架杆与机架中必有一杆为最短杆。——最短杆条件(1)最短杆与最长杆的长度和小于或等于其余两杆的长度和。——杆长条件1)曲柄摇杆机构铰链四杆机构的类型应用功能:连续转动——往复摆动连架杆为最短杆2)双曲柄机构铰链四杆机构功能:匀速转动——非匀速转动机架为最短杆平行四边形机构应用具有运动不确定性功能:匀速转动——匀速转动特例应用铰链四杆机构•若不满足曲柄存在条件(1),无论取哪个构件作机架,都是双摇杆机构。3)双摇杆机构功能:摆动——摆动连杆为最短杆•满足曲柄存在条件(1),但不满足条件(2);5.2.1.2急回特性ABCDAB1C1DAB2C2DAB1C2DB2C1M曲柄摇杆机构机构的两个极限位置曲柄与连杆共线的两个位置极位夹角摆动范围21ttK-急回系数K急回特性C1B2AB1C2DM12K11KK2121K越大,急回特性越显著1KMC1C2D36.1618012.112.118011kk2.1,4515km已知,:设计一曲柄摇杆机构—例C1C2MA90B2AB1C2DC1MMD本题的解有无穷多个abAC1abAC2221ACACa221ACACbC1C2MabAaB2B1D5.2.1.3压力角与死点无功分量—有功分量—21FF压力角:从动件上所受驱动力方向与力的作用点速度方向的夹角。50~40][][max越小,传力性能越好F1F2vFABCD90传动角40~50][min140~130][max][][maxmin传动角CABDminCABDmaxADBC位置和minmax曲柄与机架共线的两个位置越接近90,传力性能越好的位置称为死点位置)(或机构处于090死点连杆与从动件共线的两个位置对于曲柄摇杆机构,当摇杆为主动件时,会出现两个死点位置。0e偏心曲柄滑块机构:0e对心曲柄滑块机构:曲柄条件:beaABCABC曲柄条件:ba无急回特性有急回特性ab压力角死点位置:AB与BC共线(滑块为主动件)滑块行程:s=2aab对心曲柄滑块机构与偏心曲柄滑块机构摆动导杆机构:ab1、传力性能好0abBAC特点:由转动的主动件+RPR杆组而成M12ab)arcsin(2bammmk1801802118011kkm急回系数:2、有显著的急回特性BAC摆动导杆机构A′12回转导杆机构:ab匀速转动非匀速转动§5—6用图解法设计连杆机构M1M2N1N2E1E212P12P12——转动极(极)θ12——有向转动角动平面由E1到E2的位置过程中,动平面上任意一点都绕P12转θ12半角转动法及其基本原理M1M2N1N2P12m12n121212N0M0θ12/2——转动半角,为有向角M1P12——始边M0P12——终边N1P12——始边N0P12——终边导引动平面由E1到E2的位置的四杆机构的设计1.求极点2.求转动半角3.刚化半角,半角绕极点转动4.在半角始边选动铰链,在半角终边选定铰链5.顺序连接各铰链,并将动平面固结到连杆上,得四杆机构即为所求。设计步骤:M1M2N1N2P12m12n12M0N05.连接各构件,将动平面固定到连杆上1.求极点P122.求转动半角θ12/23.刚化半角,绕极点P12转动4.在始边选动铰链,在终边选定铰链θ12/2按给定两连架杆的对应位置设计四杆机构N1M1A0B0N2ΨM2φ给定连杆平面序列位置问题转化为相对运动原理按给定两连架杆的对应位置设计四杆机构R1222A0B0M1N1M2N2Ψφ相对极和转动半角求法:1221沿A0B0方向线作-φ/2和-Ψ/2角,两线交点即为相对极,夹角即为转动半角2按给定两连架杆的对应位置设计四杆机构A0B0R12M2N2M1N12sA0'M1'M1M2B2B1A0R12212一连架杆转过φ角,另一连架杆(滑块)移动S距离2-s/2转动极和转动半角的求法:过A0作导路的垂线,由此作-φ/2和-s/2,两线交点为极点,夹角为转动半角sM1M2B2B1A0R1222s一连架杆转过φ角,另一连架杆(滑块)移动S距离第六章凸轮机构及其设计圆称为基圆为半径的廓线的最小向径基圆半径,以凸轮理论—00rror0AB’BCD滚子从动件盘形凸轮机构从动件的基本运动规律称为从动件运动规律关系的函数对凸轮转角从动件位移)(ss22dsdsddss类加速度)(类速度)(——ss)(sssdtdddsdtdsv222222)(sdtddsddtsdas0推程运动线图ss等速运动规律00开始点vtva00结束点va0hs0hs0s速度突变产生刚性冲击,适用于低速场合。2020220442hshshs2002020204)(4)(2hshshhs等加速等减速运动sssh2000020加速度突变产生柔性冲击,适用于中速场合。简谐运动规律——余弦加速度运动规律0202000cos2sin2)cos1(2hshshssss0h有休止,有柔性冲击;无休止,无冲击。02000002sin2)2cos1()sin21(hshshs正弦加速度运动规律sss0h没有冲击凸轮轮廓曲线的设计的图解法基本方法:反转法依据:相对运动不变原理基本思想:设想给整个机构加上一个与凸轮角速度ω大小不变而方向相反的转动,此时,凸轮静止不动,而从动件一方面随机架相对凸轮以-ω的角速度绕凸轮轴转动,另一方面又以原有的运动规律相对机架运动。e已知r0,偏心距e,1偏置直动尖顶从动件盘形凸轮120°90°90°60°sr0e直动从动件盘形凸轮轮廓的设计从动件的运动规律1)作基圆,偏心圆,从动件导路,按从动件的运动规律标出各运动角2)将推程运动角和回程运动角等分并得到一系列与基圆的交点。偏置直动尖顶从动件盘形凸轮轮廓的设计e120°90°90°60°se1234567893)过交点作偏心圆的切线,沿偏心圆的切线从基圆开始量从动件的位移量,又得到一系列点1、2、3…s123456789偏置直动尖顶从动件盘形凸轮轮廓的设计e4)用光滑曲线连接一系列点1、2、3…,得到凸轮轮廓曲线。偏置直动尖顶从动件盘形凸轮轮廓的设计123456789es2偏置直动滚子从动件盘形凸轮120°90°90°60°se直动滚子从动件盘形凸轮轮廓的绘制120°90°90°60°滚子中心——理论廓线e直动滚子从动件盘形凸轮轮廓的绘制s120°90°90°60°滚子中心——理论廓线包络线——实际廓线6.4凸轮机构设计中的几个基本问题•从动件运动规律的确定方法•压力角和自锁•凸轮廓线曲率半径和运动失真•凸轮机构基本尺寸确定6.4.2凸轮机构的压力角和自锁直动从动件力作用线方向与从动件速度方向所夹的锐角称为压力角。seresssesBCOCOPtg2200s0soCPBeFv'||||sOPOPP即与r0,e,s’有关,且r0越大越小s0socpBe凸轮顺时针方向转动,从动件应偏置于凸轮轴心左侧;凸轮作逆时针方向转动,从动件应偏置于凸轮轴心的右侧。偏心距e的确定为了减小推程压力角:第七章齿轮机构及其设计KNArbⅠⅡⅠⅡOk
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码

 jiangpopo
jiangpopo
本文标题:机械原理期末复习
链接地址:https://www.777doc.com/doc-6842596 .html