您好,欢迎访问三七文档
当前位置:首页 > 行业资料 > 国内外标准规范 > adams-挖掘机建模过程及运动仿真
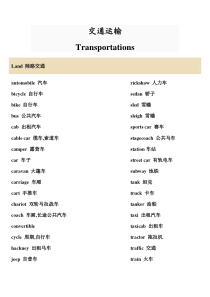
挖掘机建模过程及运动仿真完成如下挖掘机简化模型,并进行运动过程仿真及受力分析:挖掘机总体结构图1建立挖掘机模型1.1建立挖掘机底盘模型运行adams,建立新模型,设置工作网格大小为5000x2000,间隔为100mm。使用工具box建立模型,length=4200,height=900,depth=2800,设置为onground;再在box1左右两端建立box2和box3,length=1200,height=900,depth=1600,设置为onground;使用位置调整工具,调整box2和box3的位置在box1沿z轴方向的中间,使用布尔运算工具从box1中减去box2和box3;使用工具Cylinder建立旋转支撑部分,length=200,radius=700,设置为addtopart,调整位置,使其位于box1中间。使用fillet工具将box1左右倒圆角,radius=450;底盘模型建立完成,如图1-1所示车身底盘动臂斗杆液压缸动臂液压缸斗杆铲斗摆杆下连杆铲斗液压缸上连杆1图1-1挖掘机底盘1.2建立车架模型使用工具box建立模型,length=2400,height=300,depth=2200,设置为newpart;使用工具box建立动臂支架座,length=200,height=900,depth=500,设置为addtopart;使用工具box建立两个动臂液压缸支架座,length=200,height=300,depth=200,设置为addtopart;使用位置调整工具调整支架座的位置,使动臂支架与液压缸支架座x向间距500mm,两液压缸支架座z向间距700mm,;动臂支架位于两液压缸支架z向中间位置;使用工具fillet对支架上侧倒圆角,radius=100;使用工具marker,在各支架座圆弧圆心沿z轴中间位置建立marker点,液压缸支架上为marker16、marker16,动臂支架为marker14;修改模型名称为chejia;模型完成如图1-2所示:2图1-2完成车架模型1.3建立动臂模型使用工具Extrusion建立动臂模型,选择由点创建,各点坐标如图1-3所示,length=500mm,并倒角,在动臂左端建立marker48,右侧建立marker18,移动使marker18与车架上的marker14重合;图1-3动臂拉伸建模坐标点3使用工具box在动臂上方建立斗杆液压缸支架座,length=200,height=400,depth=200,设置为addtopart;使用工具cylinder在动臂两侧建立动臂液压杆支座,length=200,radius=50,使用位置工具调整到合适的位置;动臂完成后如图1-4所示:图1-4完成动臂模型1.4建立动臂液压缸使用工具cylinder建立液压缸,length=1200,radius=70,液压杆length=1200,radius=50;调整位置如图1-5所示图1-5完成动臂液压缸模型41.5建立斗杆模型使用工具Extrusion建立动臂模型,选择由点创建,各点坐标如图1-6所示,length=500mm,并倒角,在动臂右端建立marker50,移动使marker50与动臂上的marker48重合;使用工具cylinder建立摆杆连杆支座模型,length=400mm,radius=60mm;位于斗杆下方前后两侧对称布置;使用工具box建立铲斗液压缸支座,length=400mm,height=200mm,depth=200mm,使用位置工具调整角度和位置,并倒角radius=100mm;斗杆完成如图1-7所示。图1-6斗杆拉伸坐标点5图1-7完成斗杆模型1.6建立铲斗模型使用工具Extrusion建立铲斗外形模型,选择由点创建,各点坐标如图1-8所示,length=900mm使用工具Extrusion建立铲斗内腔模型,选择由点创建,各点坐标如图1-9所示,length=700mm,使用布尔运算工具想减完成铲斗模型,并倒角。使用工具box建立铲斗连杆支座,length=200,height=80,depth=100,调整到合适的位置,并倒角。铲斗模型完成如图1-10所示:图1-8铲斗外形拉伸坐标点6图1-9铲斗内腔拉伸坐标点图1-10完成铲斗模型1.7建立斗杆液压缸模型方法同1.4,完成如图1-11所示7图1-11完成斗杆液压缸模型1.8建立摆杆和连杆模型使用工具cylinder建立摆杆模型,length=700,radius=50,调整到位;使用link工具连接摆杆和相应的支座,完成如图1-12所示图1-12完成摆杆和连杆模型1.9建立铲斗液压缸模型方法同1.4,完成如图1-13所示,8图1-13完成铲斗液压缸模型1.10模型检查,结果如下VERIFYMODEL:.model_1102GrueblerCount(approximatedegreesoffreedom)17MovingParts(notincludingground)102DegreesofFreedomfor.model_1Therearenoredundantconstraintequations.Modelverifiedsuccessfully2添加约束根据挖掘机各零部件的运动关系和装配关系,建立相应的marker点,在各marker点上对挖掘机各部件之间建立约束如表所示:构件一构件二约束类型底盘车架Revolute车架动臂Spherical车架动臂液压缸(左)Spherical车架动臂液压缸(右)Spherical动臂动臂液压杆(左)Revolute动臂动臂液压杆(右)Cylinder动臂斗杆液压缸Spherical斗杆斗杆液压杆Cylinder9动臂斗杆Revolute斗杆铲斗液压缸Spherical摆杆铲斗液压杆Cylinder斗杆摆杆上连杆(左)Cylinder斗杆摆杆上连杆(右)Cylinder摆杆摆杆上连杆(左)Spherical摆杆摆杆上连杆(右)Hooke铲斗摆杆下连杆(左)Cylinder铲斗摆杆下连杆(右)Revolute摆杆摆杆下连杆(左)Spherical摆杆摆杆下连杆(右)Spherical斗杆铲斗Revolute液压缸(四处)液压杆(四处)Translational根据挖掘机实际工作状态,对四个移动副和车身转动副添加运动驱动如下表运动位置运动类型驱动表达式底盘与车身转动副Rotationaljointmotion0动臂液压缸(左右)Translationaljointmotion0斗杆液压缸Translationaljointmotion0铲斗液压缸Translationaljointmotion0校验模型,如下图:10图2-1模型校验结果3模拟仿真3.1挖掘机运动过程仿真通过设定驱动表达式,来模拟挖掘机工作过程,挖掘机一个工作循环动作内容流程如下:时间0-2s2-4s4-6s6-8s8-10s10-12s12-14s动作内容伸动臂收斗杆收铲斗收动臂伸斗杆伸铲斗伸动臂伸斗杆底盘转过90度收铲斗底盘反向转过90度收斗杆伸铲斗收动臂伸斗杆伸铲斗动臂液压缸动作函数:STEP(time,0,0,2,-200)+STEP(time,2,0,4,200)+STEP(time,4,0,6,-500)+STEP(time,6,0,12,0)+STEP(time,12,0,14,500)11斗杆液压缸动作函数:STEP(time,0,0,2,200)+STEP(time,2,0,4,-100)+STEP(time,4,0,6,-100)+STEP(time,6,0,10,0)+STEP(time,10,0,12,100)+STEP(time,12,0,14,-100)铲斗液压缸动作函数:STEP(time,0,0,2,-300)+STEP(time,2,0,4,400)+STEP(time,4,0,8,0)+STEP(time,8,0,10,-400)+STEP(time,10,0,14,300)底盘回转驱动函数:STEP(time,6,0,8,90d)+STEP(time,8,0,10,0)+STEP(time,10,0,12,-90d)设置仿真时间14s,steps为1000进行运动仿真。3.2挖掘过程受力分析首先修改各部件质量属性,选择userinput,分别设置动臂质量为1400KG,斗杆质量为800KG,铲斗质量为400KG。设定工作过程中铲斗每次铲起3000N的土石,根据工作过程在4-6s力由零增大到最大值,在6-8s保持,在8-10s减小到零,选择在铲斗质心添加力,run-timedirection选择spacefixed,力大小通过step函数设定,函数为STEP(time,4,0,6,3000)+STEP(time,8,0,10,-3000)选择动臂与车间连接处marker199测量动臂铰链受力,measurename设为model_1.marker_199_dongbi,characteristic选择forceonpoint,component选择mag,单击ok完成测量。选择斗杆与动臂连接处marker53测量斗杆铰链受力,measurename设为model_1.marker_53_斗杆,characteristic选择forceonpoint,component选择mag,单击ok完成测量。选择铲斗与斗杆连接处marker147测量铲斗铰链受力,measurename设为12model_1.marker_147_chandou,characteristic选择forceonpoint,component选择mag,单击ok完成测量。在铲斗尖端添加marker215,用于测量铲斗加速度,右击选择measure,measurename设为model_1.marker_215_chandouacc,characteristic选择translationalacceleration,component选择mag,单击ok完成测量。进入后处理,datasimulation选择last_run,source选择measure,在measure窗口中一次选择各测量数据,点击addcurves,在窗口中依次得到动臂铰链受力图、斗杆铰链受力图、铲斗铰链受力图以及铲斗加速度图。并通过Plottracking按钮,得到各测量内容的最大值。由图3-2得动臂铰链处最大力173770N,由图3-3得斗杆铰链处最大力39862N,由图3-4得铲斗铰链处最大力23248N,由图3-5得铲斗最大加速度12687mm/s2。图3-1曲线数据来源选择13图3-2动臂铰链受力图图3-3斗杆铰链受力图14图3-4铲斗铰链受力图图3-5铲斗尖端加速度图3.3挖掘范围分析首先设置底盘旋转驱动表达式为0,并让斗杆液压缸、铲斗液压缸收缩到最小位置,15在动臂液压缸由最短伸长到最长的过程中,得到铲斗的最大挖掘深度、最大挖掘半径和最大挖掘高度。动臂液压缸驱动表达式:STEP(time,2,0,4,400)+STEP(time,4,0,6,-900)斗杆液压缸驱动表达式:STEP(time,0,0,2,600)铲斗液压缸驱动表达式:STEP(time,0,0,2,-300)设置仿真时间6s,仿真步数为500,进行仿真。通过菜单reviewcreatetracespline,选择铲斗尖端marker215创建轨迹线,如图3-1所示。选择marker215,进行测量,y方向值为挖掘深度和高度,x方向为挖掘半径值,如图3-2所示,从图中可知挖掘机最大挖掘高度为4075.16mm,最大挖掘深度为3701.30mm,最大挖掘半径为7941.25mm;图3-6挖掘范围轨迹ABC16图3-7挖掘范围测量曲线ABBC
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 lygh0419
lygh0419
本文标题:adams-挖掘机建模过程及运动仿真
链接地址:https://www.777doc.com/doc-6898966 .html