您好,欢迎访问三七文档
当前位置:首页 > 机械/制造/汽车 > 汽车理论 > 无人机动态飞行参数处理及应用策略
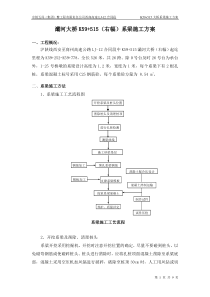
无人机动态飞行参数处理及应用策略时间:2011-04-3021:23:41来源:论文发表作者:秩名论文导读:本文根据无人机系统在设计阶段的可靠性测试要求。研究其飞行参数处理方法。文章首先分析了在无人机系统实时飞行仿真和综合测试平台中进行飞行参数动态数据采集。我们将飞行参数判读分成三个过程:预处理、基于专家规则的飞行参数自动判读和详细分析。其中研究用于知识发现实现对飞行参数自动判读的专家规则是研究的重点。关键词:飞行参数,专家规则,知识发现,可靠性,无人机1引言在无人机可靠性测试过程中,故障注入技术已经得到了实际的应用,但是故障注入只能用作加速系统故障的一种手段,在评价系统行为方面却显得无能为力[1]。飞行参数是飞机在飞行过程中形成的各种机载设备的状态参数信息[2]。在无人机系统实时飞行仿真和综合测试平台中进行飞行参数处理,对无人机的遥控动作识别、机载设备技术状况和性能趋势分析具有重要的作用。因此,将飞行参数处理技术与故障注入技术相集成可以合成测试无人机系统可靠性的完整技术。本文根据无人机系统在设计阶段的可靠性测试要求,研究其飞行参数处理方法。文章首先分析了在无人机系统实时飞行仿真和综合测试平台中进行飞行参数动态数据采集,形成飞行参数时序数据流的过程;其次研究了飞行参数处理方法;最后针对某型无人机的特点给出了一个具体的应用实例,并分析了飞行参数动态处理过程。2飞行参数动态数据采集及其特点无人机系统实时飞行仿真和综合测试平台是一个半物理仿真平台,它利用计算机技术模拟无人机的真实飞行环境。该平台主要由任务管理、导航与飞行控制计算机(以下简称:飞行控制计算机)及一些机载设备组成,如图1所示。从图1可以看出,在无人机系统中主要是飞行控制计算机与各种机载设备之间进行数据交换,因此我们可以在机载设备与飞行控制计算机的通信链路中进行飞行参数采集。机载设备与飞行控制计算机之间的数据通信是高度实时的,可以认为它们通信的数据都是连续的。对这些连续的飞行参数进行实时辨识并不能达到判读飞行参数的目的,因为无人机是一个非线性、时变的多通道深度铰链的系统,单纯的某个飞行参数的时间曲线并不具备太多的实际意义。免费论文网。飞行参数时间序列相关性分析可以进行基于归纳的系统行为有效预测。在无人机模拟飞行中,按照合适的采样频率对飞行参数进行按帧采集形成飞行参数时序数据流是无人机飞行参数动态处理的必要前提。在无人机动态测试平台中,采集到的单帧飞行参数包括位置参数、运动参数、遥控遥测参数、主系统状态参数和报警参数。采集的飞行参数具有状态点的时序不可重复性,即采集的飞行参数与采样时刻的无人机状态一一对应,采集到的飞行参数一旦丢失就不可能完全复现。单帧飞行参数对判读无人机的行为并不具有实际的物理意义,具体的做法是分析飞行参数时序曲线的变化趋势,并根据无人机飞行动力学、运动学特征分析飞行参数时序曲线之间的相互依赖,如无人机遥控时参数间的同步速率、滞后时间和门限差值,可用于判断操纵灵敏度和稳定性。免费论文网。研究参数分布规律可对系统机载设备的技术状态、预警和无人机操纵手的技术水平进行判断。3飞行参数处理方法根据飞行参数数据特点,我们将飞行参数判读分成三个过程:预处理、基于专家规则的飞行参数自动判读和详细分析。其中研究用于知识发现实现对飞行参数自动判读的专家规则是研究的重点,也是研究的难点。3.1飞行参数数据预处理飞行参数数据采集设备故障以及数据传输的错误都会造成数据的不完整性、含噪声和不一致性。数据预处理采用滤波、平滑等数据处理方法能够提高数据质量和排除数据中的干扰。数据预处理的步骤是数据清理和数据变换。3.1.1飞行参数数据清理飞行数据中经常会出现一些变化异常的数据,其主要特征为:单位时间内的信号变化量超出了该信号变化的正常范围、信号的幅值超出规定值、信号的变化规律不符合无人机及其系统的实际工作情况、飞行参数时序数据流中某个单帧数据的所有参数值在同一时刻出现突变。这些数据点往往属于虚假信号,通常称其为“野值”。在分析数据的过程中需要确认出现的数据异常点是否为“野值”,若是,则剔除,并根据无人机飞行手册的性能参数范围和飞行日报表进行平滑处理;若不能确定,则需保留并作进一步分析。对“野值”的判断出现错误会直接影响数据分析结果。3.1.2飞行参数数据变换飞行数据中还经常会出现时间参数变化异常的数据,这时就需要对其进行软件或人工校正。对同性质参数采用数据融合的方法进行对比分析,用正确的数据来修改错误的数据。如为了提高系统的可靠性,无人机航向姿态系统和捷联惯性导航系统都提供飞机的航向姿态信息,此时可以利用一个系统的正确值来修正另一个系统的奇异值。对单个飞行参数的时序曲线中出现连续多个奇异点的情况采用基于序列变化模式的光滑曲线子段表示方法,从序列中选择奇异点邻近的极值点,用这些极值点生成光滑曲线子段来表示原始序列。3.2基于专家规则的飞行参数自动判读从飞行参数时序数据流获取信息,并将它们组织集成,其目的在于对所获取信息进行分析和综合[3]。知识发现是人工智能的关键技术,运用该技术可以从大量特殊性和个别性的飞行参数数据中抽象出具有一般规律性的知识,提取人们感兴趣的数据模式、数据间的普遍关系及其一些潜在的、事先未知的数据特征,将大量的原始数据转换为有价值的知识,用于描述无人机过去的状态和预测未来的趋势。知识发现的关键技术是实现单个飞行参数时序曲线的模式识别和多个飞行参数时序曲线的关系识别。基于专家规则的飞行参数处理方法是目前国内外用于飞行参数处理的主要方法,该方法以数值分析为工具,在专家知识的指导下寻找飞行参数数据的内在规律,形成专家系统的推理规则,并据此进行飞行参数的判读。利用专家规则进行知识发现可以有效地实现单个飞行参数时序曲线的模式识别和多个飞行参数时序曲线的关系识别,实现飞行参数的自动判读。某型无人机的飞行参数专家规则描述如下:if(Fi判据&&Fi+1判据﹍&&Fi+n判据)then事件,其中“Fi+n判据”表示对飞行参数Fi+n的时序曲线的模式识别,多个判据相与表示多个飞行参数时序曲线的关系识别。例如:当、、、、且持续时间大于5s,则无人机进入平飞状态。免费论文网。3.3飞行参数详细分析无人机的飞行过程是复杂性的,专家规则并不能完整地描述无人机的行为。在飞行参数处理过程中用人工的方法对飞行参数进行演绎、归纳和类比是非常必要的。3.3.1按飞行阶段分析对照飞行科目或飞行指南等规定确定的各个飞行阶段:车载滑跑、弹射起飞、巡航和下滑着陆等,将每个飞行阶段的特征参数(速度、高度、滚转角、俯仰角、航向角、发动机状态)与正常飞行状态进行比较,确定飞机在各飞行阶段中的状态和航迹是否正常,找出出现问题或偏差的时刻,并分析出其可能原因。3.3.2参数分组分析根据不同分析对象,把飞行参数按所属系统进行分组并分析。例如在分析无人机发动机的技术状态时可选择下面的飞行参数作相关性分析:油门位置、排气温度、滑油压力、涡轮转速和振动水平。4应用实例与飞行参数动态处理过程应用上面的方法,采用面向对象的程序设计方法设计了一个实际的飞行参数动态处理系统UAVFDD_01,如图2所示。采用软件工程中模块化原则对该系统进行分析与设计。整个系统分为如下功能模块:数据采集模块、数据处理模块、数据记录模块、处理结果输出模块、飞机设计建议模块和判据编辑模块。在机载设备与飞行控制计算机的通信节点上,数据采集模块针对不同的飞行参数按照合适的采样频率进行按帧数据采集。采集到的飞行参数在数据处理模块中进行预处理、自动判读,其处理结果通过处理结果输出模块输出。飞机设计建议模块根据飞行参数处理的结果给出飞机设计建议。为了重放飞行参数处理过程,在以上动态过程中数据记录模块对采集到的飞行参数按帧记录,对数据处理结果也按照专门的格式保存。UAVFDD_01是一个开放的系统,用户可以根据需要自己编辑飞行参数专家判据,提高UAVFDD_01的飞行参数自动判读能力。从飞行参数数据采集到飞行参数自动判读的过程是一个与无人机模拟飞行同步的过程,由于在这个过程中不能完全判读无人机的行为,所以在模拟飞行结束后应当根据数据记录模块记录的数据进行详细分析。5试验过程与结果分析在无人机仿真平台中进行综合测试时,首先要利用故障注入技术模拟无人机机载设备的故障,然后再利用飞行参数处理技术判读无人机的行为,只有这样才能在无人机内部产生故障g错误g失效[4]的递进关系,演示机载设备的寿命试验过程。在无人机相同技术状态下,分别对各子系统注入一定数量的故障,检测无人机飞行参数处理系统对无人机行为的自动判读能力,试验的统计结果如表1所示。无人机系统综合测试是一个非常复杂的过程,为了从整体上验证无人机系统的可靠性需要做更多的试验。在分析飞行参数的时候,一定要根据具体的测试性要求对飞行参数处理系统记录下来的飞行参数及其处理结果作进一步的详细分析。6结束语飞行参数记载的是无人机的飞行状态信息,在数据处理时有其独到的特点。本文给出了在无人机飞行控制系统实时飞行仿真和综合测试平台中进行飞行参数处理的方法,研究了飞行参数处理系统结构,并分析了飞行参数动态处理过程。飞行参数动态处理系统能够实时地监控无人机的行为,将它与故障注入系统相结合可以非常容易地实现对无人机系统可靠性的测评。所以,随着研究的进一步深入,飞行参数数据处理必将在无人机系统设计过程中发挥更大的作用。表1无人机系统综合测试试验统计数据其他属性故障位置故障注入数量子系统技术状态无人机技术状态航姿系统9检测到9个故障航姿系统告警,飞行可控差分GPS7检测到7个故障差分GPS告警,飞行可控无线电高度表1检测到1个故障无线电高度表告警,飞机应急拉起大气数据系统8检测到8个故障大气数据系统告警,飞行可控,提示应急着陆捷联惯导系统22检测到22个故障捷联惯导系统告警,飞行可控,提示返航执行机构24检测到24个故障执行机构系统告警,飞行不可控,出现一等事故舵机监控系统16检测到16个故障舵机监控系统告警,飞行可控参考文献1J.Arlatetal.Faultinjectionfordependabilityvalidation:amethodologyandsomeapplications.IEEETrans.SoftwareEng,16(2)1990.2MikeNebylowitsch.Developingflightdatamonitoringsystem.RoyalAeronauticalSociety97—35906,1997.3梁建海,孙秀霞,杜军.基于数据挖掘的飞行参数处理方法研究.弹箭与制导学报,2005,25(1):76~79。4RaphaelRSome,WonSKim,GarenKhanoyanetal.ASoftwareImplementedFaultInjectionMethodologyforDesignandValidationofSystemFaultTolerance.IEEEComputersociety,2001,0-7695-1101-5.
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 asqaz1
asqaz1
本文标题:无人机动态飞行参数处理及应用策略
链接地址:https://www.777doc.com/doc-6925757 .html