您好,欢迎访问三七文档
当前位置:首页 > 电子/通信 > 综合/其它 > 大学生电子仿真实训、课程设计 报告
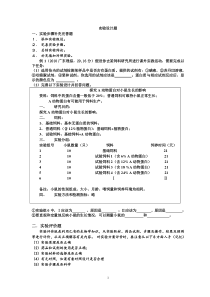
1北京联合大学实验(实习、实训)报告课程(项目)名称:电子仿真实训学院:北联大特教院专业:计算机应用技术班级:200906124301学号:姓名:成绩:2011年12月19日2一、摘要计算机仿真是一门利用计算机软件模拟实际环境进行科学实验的技术。它具有经济、可靠、灵活、安全、实用、可反复使用的优点。它已成为对许多复杂系统(工程、非工程)进行分析、设计、实验、评估的必不可少的手段。本次计算机仿真实训课,选择用通用机器人软件、竞赛用器人(四轮驱动车)进行机器人走迷宫遇到黑色线停止的过程(原题是遇到火源灭火,由于机房内部不能有明火,因此改为遇到黑色线停止),在实际应用中,机器人灭火设备可以很好的帮助搜救员完成搜救任务,提高搜救工作效率。而在科学实验室中,利用机器人走迷宫做研究也很常见。本次通用机器人仿真实训课就是要模拟类似的场景,完成实验任务。二、研究方法在实验过程中我们需要用到计算机,“通用机器人”软件,竞赛用机器人(四轮驱动车),数据传输线。我们需要给机器人配置光敏传感器,来判断地面的颜色,使之能够实现遇到黑色线停止。还需要配置红外传感器,来判断前方是否有障碍物,使之能够实现自动避障的功能。光敏传感器光敏传感器是最常见的传感器之一。它的敏感波长在可见光波长附近,包括红外线波长和紫外线波长。光传感器不只局限于对光的探测,它还可以作为探测元件组成其他传感器,对许多非电量进行检测,只要将这些非电量转换为光信号的变化即可。红外传感器是利用红外辐射与物质相互作用所呈现出来的物理效应探测红外辐射的传感器,多数情况下是利用这种相互作用所呈现出的电学效应。此类探测器可分为光子探测器和热敏感探测器两大类型。而在实验中我们所用到的是光子探测器。可以说光敏传感器和红外传感器相当于机器人的眼睛,帮助机器人辨别光线的明暗、色彩的变化,以及周围环境的大致信息,比如:前方是否有障碍物、前方色彩明暗等等。三、方案设计和工作原理(1)配置场地打开通用机器人软件,标题栏菜单“设置”——“设计场地”,绘制场地如下图所示:3需要注意的是,黑直线默认宽度为0.05,需要手动更改宽度为0.1。更改方法:选择已画好的黑直线,选择标题栏的“窗口属性”,弹出对话框,选择“元件属性”对话框,在“粗细”一栏将数值更改为0.1即可。更改黑直线粗细的目的是增强传感器识别度。然后点击“保存”,保存好场地设计文件,为了在后面的编程和配置机器人的过程中,不与其它文件发生混淆,将此实训单独建立一个文件夹保存这次试验用的场地文件(.fld)、机器人配置文件(.set)和程序文件(.bas)。(2)配置机器人标题栏菜单“设置”——“配置机器人”在打开的机器人配置界面中选择“打开车体”,在自己的安装目录中选择一个机器人车体,然后为机器人添加红外传感器和光敏传感器,红外传感器于左右侧和4正前方各放置一个,光敏传感器放置于机器人正前方两端。如下图所示:然后为传感器设置安装端口,机器人共有16个双向的I/O(输入输出端)口,打开和关闭不同的I/O(输入输出端)口,机器人会有不同的反应。端口和各功能匹配如下:功能I/O值为0值为1左电机正转PIN0关开左电机反转PIN1关开右电机正转PIN2关开右电机反转PIN3关开调制脉冲PIN4关开前红外线传感器PIN5发现避障没有发现避障左红外线传感器PIN6发现避障没有发现避障右红外线传感器PIN7发现避障没有发现避障左光敏传感器PIN14浅颜色(白色)深颜色(黑色)右光敏传感器PIN15浅颜色(白色)深颜色(黑色)根据上面的表格,我们要为传感器配置“安装端口”,配制方法如下:选择已配置好的传感器,点击标题栏“窗口属性”选项,弹出对话框“传感器属性”,在“安装端口”输入相应的数值。如下图所示:5(3)设计流程图非本次实训重点,由于期末考试时卷面已写过,故不再做累述。只要知道这一步在开始一个新的仿真设计的时候必不可少就行了。(4)编写QBasic语言程序代码编写程序代码如下:dirb0=%11100000dirb1=%11110000pinb0=0pinb1=0pin9=0li:ifpin14=1andpin15=1thenifpin5=0thenrt1ifpin5=1thenrt2gotolirt1:ifpin6=0andpin7=0thenpinb0=%00011001pause200ifpin6=1andpin7=0thenpinb0=%00011001pause200ifpin6=0andpin7=1thenpinb0=%00010110pause200ifpin6=1andpin7=1then6pinb0=%00010110pause200endifendifendifendifgotolirt2:ifpin6=0andpin7=0thenpinb0=%00010101pause1ifpin6=1andpin7=0thenpinb0=%00011001pause200ifpin6=0andpin7=1thenpinb0=%00010110pause200ifpin6=1andpin7=1thenpinb0=%00010101pause1endifendifendifendifgotolipause10elsepin9=1pinb0=0endifgotoli(5)调试机器人所有的工作做完之后,我们要对机器人进行“仿真”模拟,在计算机上尝试运行。1.通用机器人软件界面——“设置”——“仿真设置”7“使用空白场地”前的勾选抹掉,然后选择相应的场地和机器人点击“确定”2.点击按钮,试运行程序点击试运行,如果在运行过程中出现问题,点击“关闭”后返回主界面修改程序或者机器人配置、场地配置。如果没有问题就可以下传到竞赛机器人(四轮驱动车)了,使用传输线连接主机和竞赛机器人(四轮驱动车),确认传输线连接好后,选择主界面——“运行”8——“连接机器人”或者点击按钮,弹出对话框:此时打开竞赛机器人(四轮驱动车)的开关,可以看到“下传”按钮变为可点击状态,点击“下传”即可将程序传入竞赛机器人(四轮驱动车),下传成功后,屏幕上出现“程序下传正确”的提示,如下图:单击按钮,完成程序下传。四、调试和问题分析在做本次实训的过程中出现过三次问题:第一次是编好程序代码之后进行“仿真”模拟,发现竞赛机器人(四轮驱动车)遇到黑色线并不停止,而是直接向前开,检查了程序代码,并没有发现任何问题,后来经同学提示,又检查了一下机器人配置,发现光敏传感器安装端口填写错误,修改正确后,程序运行成功。由此总结当“仿真”模拟出现问题的时候,仅仅检查代码是不够的,它也可能是由于机器人或者场地配置不正确而出现的问题,所以一旦出现错误,优先检查代码(因为这个出错的可能性最高),其次还要检查9场地文件(.fld)、机器人配置文件(.set)。第二次是程序编写之后下传到竞赛机器人(四轮驱动车)时,发现竞赛机器人(四轮驱动车)遇到障碍后不能很好的避障,转弯幅度过小,总是要转好几次才能避开障碍。这个问题主要是因为程序代码的pause数值过小,这个问题在计算机“仿真”的过程中难以发现,究竟设置pause的数值为多少比较合适还需要自己不断修改尝试,最终我将pause数值定到200,下传到竞赛机器人(四轮驱动车)后发现可以成功避障了。第三次是在下传过程中出现错误提示对话框,显示“下传失败”,重新检查了一下主机和竞赛机器人(四轮驱动车),并没有问题,我将数据线重新插拔了一下,然后再启动竞赛机器人(四轮驱动车)开关,显示下传成功。这个应该是因为数据线接触不良的缘故产生的问题。所以传输数据的时候要仔细检查数据线是否插牢。五、实验总结(心得体会)通过本次实训,初步了解了机器人仿真技术的实际运用。在做这个实训的时候,觉得机器人仿真的模拟性还是非常高的,它可以极大的缩减开发经费以及开发的繁复程度,是一项有实用价值的项目。另外,在做仿真设计的时候一定要有足够的耐心,因为不同的程序对应不同的场地和机器人配置,很难一次性就成功,很多的时候还是需要反复调试、修改最终才能有一个比较满意的结果。往往编程的时候少打一个零或者做机器人配置的时候忘记添加好安装端口号这样的小问题,对机器人最终运行结果的影响都是很大的。最后感受比较深的是我们初学者往往都容易忽视编写流程图的重要性。其实,现在我们学习的内容还非常浅,仅仅编写过前进、后退、左右转、避障、停止等等几个简单动作的QBasic代码,尚未加入爬坡、投篮、声控感应等机器人仿真QBasic代码。所以就目前而言,很多同学都是跳过绘制流程图的部分,用脑子思考一下直接做QBasic的程序代码,这是一个很不好的习惯,如果以后要编写复杂的QBasic代码,而没有流程图,自己在编写的过程中思路就会出现混乱,QBasic代码的修改也会困难得多。所以这也是我们一定要注意的问题。六、参考资料计算机仿真技术讲义(第二册)
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 640000a
640000a
本文标题:大学生电子仿真实训、课程设计 报告
链接地址:https://www.777doc.com/doc-69670 .html