您好,欢迎访问三七文档
当前位置:首页 > 商业/管理/HR > 企业财务 > 计算机视觉学习初识LBP算法
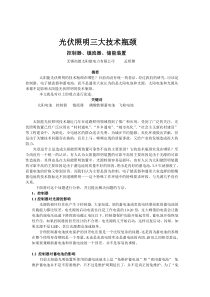
计算机视觉学习初识LBP算法LBP(LocalBinaryPattern)LBP特征是根据相邻的像素点与中间相邻点相比的大小确定置为1或0,然后对每个像素点的领域信息进行整合,变为领域个位的数的编码。然后对一个块中所有像素的编码进行直方图的统计,得到LBP特征。一个LBP操作可以被定义为:S是符号函数,定义为:总结:这种方法可以很好的捕捉到图像中的细节,但是固定的近邻区域对于尺度变化的编码失效。为了适应不同尺度的纹理特征,Ojala对于LPB算子进行了改进,将3*3邻域扩展到任意邻域,并且用圆形代替正方形。函数表示均匀模式的LBP算子近邻点计算双线性插值算法的引入——如果近邻点不在图像的坐标上,如何确定该点的像素值?其中R是圆的半径,P是样本点的个数双线性插值线性插值:假设A点的值为5,C点的值为3,AC间插值,则B点的值为4A(0,0)B(1,0)C(2,0)如果B不在AC连线之间,就采用双线性插值,双线性插值的思想就是在两个方向上分别进行一次线性插值。如右图所示:已知Q11,Q12,Q22,Q21四个点,要插值的点为P,则采用双线性插值。双线性插值化简:双线性插值如果选择一个坐标系统使得如果选择一个坐标系统使得四个已知点的坐标分别为(0,0),(0,1),(1,1),(1,0),那么插值公式就可以简化为:用矩阵的形式表示:再一次简化:注意:虽然是双线性插值,但最后的结构是非线性的。LPB—如何实现旋转不变性?LPB特征是灰度不变,但不是旋转不变的,同一幅图像,进行旋转以后,其特征将会有很大的差别,影响匹配的精度。Ojala在LBP算法上,进行改进,实现了具有旋转不变性的LPB的特征。实现方法:不断旋转圆形邻域得到一系列初始定义的LPB值,取最小值作为该邻域的值。LPB—如何实现旋转不变性?求取旋转不变的LPB特征示意图对于邻域像素顺序的规定并没有明确的规定,上图默认为水平方向左侧为起始点,逆时针旋转。图中8种模式所对应的LPB模式都是:00001111。LPB等价模式问题的引出:等价模式—对LPB算子的模式种类进行降维。解决方法:LPB等价模式Ojala等认为,在实际图像中,绝大多数LPB模式最多只包含两次从1到0或从0到1的跳变。等价模式:当某个局部二进制模式所对应的循环二进制数从0到1或从1到0最多有两次跳变时,该局部二进制模式所对应的二进制就称为一个等价模式。比如:00000000,11111111,11110010,10111111都是等价模式。检查某种模式是否是等价模式:LPB等价模式混合模式:除了等价模式之外的称为混合模式。可以通过低通滤波的方法来增强等价模式所占的比例。图c经过高斯滤波后,其等价模式所占比可以增加到90%。旋转不变的等价模式LBP非参数统计测定图像f(x,y)直方图的定义为:可以用卡方来计算两个直方图的差异:
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码



 partyworld
partyworld
本文标题:计算机视觉学习初识LBP算法
链接地址:https://www.777doc.com/doc-6983300 .html