您好,欢迎访问三七文档
当前位置:首页 > 电子/通信 > 综合/其它 > 恒功率交流电子负载的研究
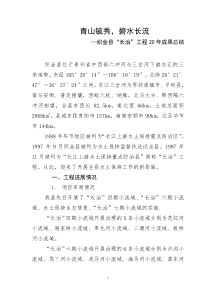
图1交流电子负载拓扑结构定稿日期院2009-09-01作者简介院张晓斌渊1963-冤袁男袁山东人袁教授袁研究方向为飞机电气系统尧电力电子技术遥1引言随着航空变频发电系统的广泛使用[1]袁以及现代飞机越来越多地采用电力作动装置取代液压尧气压能源[2]袁导致飞机电源系统的功率电子负载不断增加遥为了提高供电系统的稳定性袁需要对航空变频供电系统在不同性质负载下的性能进行测试遥文献[3]介绍了一种固定开关频率的可变功率因数PWM整流器袁对所提出设计进行仿真袁但没有硬件的设计遥文献[4]应用Boost电路设计可调功率因数的变换器袁电路设计比较简单袁但交流输入侧需串联大容量直流电容袁实现比较困难遥文献[5]应用Buck型桥式变换电路设计了一种功率因数可调的变换器袁采用电感电压控制方法袁详细地分析了几种控制方法的优缺点袁并给出了仿真和试验结果遥文献[6]提出基于背靠背单相PWM整流器的电子负载袁讨论了直流母线电容与直流电压的关系袁并设计了直流母线电压的控制方法袁但只用于功率因数校正遥文献[7]介绍了一种大功率能量回馈型AC电子负载袁它可以模拟负载袁功率因数可变换并给出了详细的电流计算方法袁但试验是在低电压小功率条件下进行的袁与设计要求的大功率有一定差距遥综上所述袁研究设计了恒功率交流电子负载袁主电路采用PWM变换器袁其功率因数姿可在0耀1之间连续调节且视在功率恒定袁非常适用于航空变频供电系统的验证试验遥分析研究了负载的工作原理袁并提出相应控制方法袁最后通过试验样机进行验证遥2电子负载工作原理交流电子负载原理与PWM整流电路相同袁对单相桥式变换器的输入电流进行控制袁让输入电流跟踪给定的正弦信号袁即可实现可调功率因数的变换器遥对于电源或电网而言袁变换器可以等效为不同性质的负载遥2.1拓扑结构图1示出交流电子负载拓扑结构袁该电路实际上是一个交尧直流侧可控的四象限运行的变流装置遥直流侧负载RL大小可调节遥该变换器可工作在PWM整流逆变状态袁VT1袁VT4和VT2袁VT3两组开关管工作在互补工作状态遥当直流侧电容C较大袁且纯阻性负载可调节时袁直流母线电压Udc可控制在高于交流电源电压峰值大小上遥恒功率交流电子负载的研究张晓斌袁陈兵彬袁雷涛渊西北工业大学袁陕西西安710072冤摘要院深入研究了恒功率交流电子负载袁给出其主电路拓扑结构袁分析了交流侧矢量及控制方法遥电路采用PWM整流器遥为提高电子负载的动态响应性能袁在电流环采用滞环控制方式袁针对该系统利用改变直流负载的方法来控制直流母线电压遥针对所提出的电子负载研制了试验样机袁试验结果证明设计方案可行袁控制方法有效袁电子负载能在交流电源供电情况下模拟给定功率因数且视在功率保持恒定遥关键词院电子负载曰功率因数曰交流侧矢量中图分类号院TM46文献标识码院A文章编号院1000-100X渊2010冤01-0081-03StudyofConstantPowerACElectronicLoadZHANGXiao鄄bin袁CHENBing鄄bin袁LEITao渊NorthwestPolytechnicalUniversity袁Xi爷an710072袁China冤Abstract院ElectronicloadisusedintestingofACpowersource援Anadvancedconstantpowerelectronicloadforaviationisinvestigated袁includingitsmainpowercircuit袁theoryanalysisofACvectorsandcontrolstrategy援ThePWMfull鄄bridgerecti鄄fierispresentedasthemaintopologystructure.Toachievegooddynamicperformance袁thehysteresiscurrentcontroltech鄄nologyisusedtocontrolinductorcurrent.Aimedatthissystem袁anovelmethodispresentedtostabilizetheDClinkvolt鄄agebycontrollingDCload.Aprototypeoftheproposedelectronicloadsystemisdesignedanddeveloped.Theexperimen鄄talresultsshowthatboththedesignanditscontrolstrategyareeffective袁withthesupplyofACpower袁thegivenpowerfactorcanbeachievedinthiselectronicload袁andtheapparentpowerisconstant.Keywords院electronicload曰powerfactor曰ACvectors第44卷第1期2010年1月电力电子技术PowerElectronicsVol.44袁No.1January袁201081第44卷第1期2010年1月电力电子技术PowerElectronicsVol.44袁No.1January袁2010第44卷第1期2010年1月电力电子技术PowerElectronicsVol.44袁No.1January袁20102.2交流侧矢量分析对图1中VT1耀VT4进行SPWM控制可使其桥臂交流输入端AB产生SPWM电压波形遥u中含有与us同频率且幅值成正比的基波分量以及和开关频率相同的高次谐波遥由于交流侧电感L的作用袁其电流iL只产生很小的脉动遥当只考虑基波分量时袁iL与us频率相同遥所以通过控制桥臂交流输入电压u中基波的幅值和相位即可使iL与us同相位尧反相位或超前滞后任意相位袁即模拟任意负载遥实际电路运行时袁对图1中开关管进行控制袁u和uL为PWM波形袁如果只考虑uL和u的基波分量袁电压电流矢量关系如图2所示袁即当电子负载运行时袁某一时刻交流侧各电压电流基波的矢量关系遥令Um为u的基波峰值袁Usm为us峰值袁令iL与us角度为渍袁u滞后us角度为酌遥由图1中电路拓扑和图2中矢量关系可得院us=Usmsin棕t袁u=Umsin渊棕t+酌冤渊1冤式中院棕为交流输入电源角频率遥uL=j棕LiL袁uL=us-u渊2冤由式渊1冤袁渊2冤得院uL=Usmsin棕t-Umsin渊棕t+酌冤渊3冤令iL=Isin渊棕t+渍冤袁可推得院I=1棕LUsm2+Um2-2UsmUmcos酌姨渊4冤式中院I为电感电流基波幅值遥渍=-arctanUsmsin酌Usm-Umcos酌-仔2渊5冤由上述表达式推导可知袁I和相位渍的表达式是Usm袁Um以及酌的函数袁若Usm不变袁通过控制u的基波幅值Um及其与输入电压相位酌袁可以使iL即交流电源输出电流超前或滞后电压任意角度袁实现各种负载的模拟遥3电子负载系统控制3.1电感电流控制电流控制直接影响到电子负载模拟的野真实性冶袁并且起到限流的作用遥目前电流控制技术主要有间接电流控制和直接电流控制两大类遥前者控制简单袁但其电流动态响应不够快袁且对系统参数变化较敏感曰后者则直接以快速反馈的电流为控制对象袁能获得较高品质的电流响应袁缺点是控制结构和算法较复杂遥综合比较后采用了直接电流控制技术中的滞环电流控制方法来控制交流侧电流遥滞环电流控制的突出特点之一是控制简单袁易实现遥当功率器件的开关频率较高时袁响应非常快袁且对负载和电路参数的变化不敏感遥滞环电流控制系统具有较好的稳定性和快速性遥系统控制对象为iL遥将交流电压采样袁经调理后移相作为iL给定信号iLref袁并采用模拟电路设定滞环环宽以控制电感电流跟踪给定信号遥3.2直流母线电压控制对Udc的控制采用了控制直流负载的方法遥电子负载工作时袁直流侧功率不恒定袁当模拟无功功率较大的负载时袁交流电源输出有功功率较小袁即直流侧电流较小袁所以通常所用的有功功率恒定的直流电压环控制不适合此系统遥Udc的控制是系统能稳定运行的关键遥在图1拓扑结构中袁一方面袁当us跃0时袁VT2袁VD4袁VD1袁L和VT3袁VD1袁VD4袁L分别组成了两个升压斩波电路曰us0时袁VT1袁VD3袁VD2袁L和VT4袁VD2袁VD3袁L也分别组成了两个升压斩波电路遥所以袁若控制不当袁直流侧电容电压可能比交流电压峰值高出许多倍袁对电力半导体器件形成威胁遥另一方面袁若Udc低于交流电压峰值袁电子负载工作时不能进入逆变状态袁使得iL得不到应有的控制袁交流侧电流会发生畸变或者u会含有较大的低次谐波遥为此袁设计了相应的Udc控制电路袁如图3所示遥Udc控制电路采用功率半导体器件VQ作为其直流负载袁将Udc采样并经过调理与基准信号比较袁将误差信号经过PI调节接驱动电路控制直流侧功率半导体器件使其工作在线性区遥Udc的设定值必须高于Usm袁基准信号与之成正比遥当Udc高于设定值时驱动电平升高袁功率半导体阻抗减小袁直流负载电流增加袁使Udc减小遥当Udc低于设定值时驱动电平降低袁功率半导体阻抗增大袁直流负载电流减小袁使Udc升高袁实现直流侧电压的动态调节袁同时加速了系统进入稳定状态遥直流侧电阻R的接入防止了直流侧短路袁其值较小遥4试验结果在理论研究和仿真研究基础上袁研制了功率为450W的试验样机遥样机控制电路部分由模拟电子元器件组成袁完成反馈信号调理和电压比较遥功率整流电路部分采用功率MOSFET渊TIXYS36N60冤作为其开关管袁采用IR2130作为驱动芯片袁并设计有相应的驱动和保护电路遥其中交流侧电感为0.72mH袁直流侧电容为2200滋F袁采用LEM的LA28和LV28霍尔传感器分别对交流侧电感电流和交流输入电压进行采样遥实验波形如图4所示遥图3直流母线电压控制电路图2交流侧基波矢量关系82渊上接第77页冤程序中判断电机转动位置袁调用换向程序遥图5示出主程序流程遥5实验结果与结论在实验平台上袁以1kW电机作为实验对向袁给定转速为1500r窑min-1袁并带有轻量负载袁仿真波形如图6所示袁实验波形如图7所示遥图7a为安装在转子上的3个传感器T1袁T2袁T3输入的位置检测波形遥实验结果表明袁系统能够较好地完成对无刷直流电机的控制袁整个控制方案切实可行袁适用于电动车的生产与应用遥参考文献[1]张琛.直流无刷电动机原理及应[M].北京院机械工业出版社袁1996.[2]徐科军袁张瀚袁陈智渊.TMS320X281XDSP原理与应用[M].北京院北京航空航天大学出版社袁2006.[3]ImplementationofaSensorlessSpeedControlledBrushlessDCdriveusingTMS320F240[S].TexasInstrument袁1997.[4]TexasInstrumentsIncorporated.TMS320C28X系列的CPU与外设[M]援张卫宁袁译援北京院清华出版社袁2005援图5主程序流程图图6给定转速的仿真波形图7实验波形设计采用400Hz军用中频电源作为输入袁其电压有效值为115V遥输入侧电感电流有效值控制在4A袁直流侧电压控制在约208V遥结果表明所提出电子负载设计方案可行袁控制方法有效袁能在姿=0耀1之间工作袁可模拟不同性质负载袁且视在功率恒定遥5结论深入研究了航空恒功率交流电子负载袁重点对交流侧矢量进行了分析遥采用滞环控制方法控制电感电流袁控制直流负载方法控制直流母线电压遥仿真和试验结果证明袁所提出的电子负载能在变频电源供电情况下模拟给定功率因数负载且视在功率恒定袁若将其应用于航空变频发电系统实验将有很大的应用价值和广阔的前景遥参考文献[1]LucasA袁HemelH.PowerElectronicsforAircraftApplication[A].IEEEPEDA爷95[C].1995袁渊7冤院1-4.[2]WeimerJA.TheRoleofElectricMachinesandDrivesintheMoreElectricAircraft[A].IEEEIEMDC爷03[C].2003袁渊1冤
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码








 qq475308186
qq475308186
本文标题:恒功率交流电子负载的研究
链接地址:https://www.777doc.com/doc-70892 .html