您好,欢迎访问三七文档
当前位置:首页 > 行业资料 > 冶金工业 > S7-1200运动控制
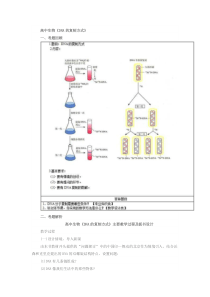
S7-1200运动控制S7-1200运动控制根据连接驱动方式不同,分成三种控制方式,如下图所示1、PROFIdrive:S7-1200PLC通过基于PROFIBUS/PROFINET的PROFIdrive方式与支持PROFIdrive的驱动器连接,进行运动控制。2、PTO:S7-1200PLC通过发送PTO脉冲的方式控制驱动器,可以是脉冲+方向、A/B正交、也可以是正/反脉冲的方式。3、模拟量:S7-1200PLC通过输出模拟量来控制驱动器。对于固件V4.0及其以下的S7-1200CPU来说,运动控制功能只有PTO这一种方式。目前为止,1个S7-1200PLC最多可以控制4个PTO轴,该数值不能扩展。S7-1200运动控制—PROFIdrive控制方式PROFIdrive是通过PROFIBUSDP和PROFINETIO连接驱动装置和编码器的标准化驱动技术配置文件。支持PROFIdrive配置文件的驱动装置都可根据PROFIdrive标准进行连接。控制器和驱动装置/编码器之间通过各种PROFIdrive消息帧进行通信。每个消息帧都有一个标准结构。可根据具体应用,选择相应的消息帧。通过PROFIdrive消息帧,可传输控制字、状态字、设定值和实际值。『注意』固件V4.1开始的S7-1200CPU才具有PROFIdrive的控制方式。这种控制方式可以实现闭环控制。S7-1200运动控制--PTO控制方式PTO的控制方式是目前为止所有版本的S7-1200CPU都有的控制方式,该控制方式由CPU向轴驱动器发送高速脉冲信号(以及方向信号)来控制轴的运行。这种控制方式是开环控制。S7-1200运动控制--模拟量控制方式固件V4.1开始的S7-1200PLC的另外一种运动控制方式是模拟量控制方式。以CPU1215C为例,本机集成了2个AO点,如果用户只需要1或2轴的控制,则不需要扩展模拟量模块。然而,CPU1214C这样的CPU,本机没有集成AO点,如果用户想采用模拟量控制方式,则需要扩展模拟量模块。模拟量控制方式也是一种闭环控制方式,编码器信号有3种方式反馈到S7-1200CPU中。如图所示。S7-1200运动控制组态步骤简介1、在Portal软件中对S7-1200CPU进行硬件组态;2、插入轴工艺对象,设置参数,下载项目;3、使用“调试面板”进行调试;『说明』S7-1200运动控制功能的调试面板是一个重要的调试工具,使用该工具的节点是在编写控制程序前,用来测试轴的硬件组件以及轴的参数是否正确。4、调用“工艺”程序进行编程序,并调试,最终完成项目的编写。截图和测试环境这部分内容的相关截图和功能说明都是基于S7-1200固件V4.1在SIMATICPortalV13SP1UPD4的环境下生成的。不同的版本的Portal软件的界面不尽相同,请用户务必确认。S7-1200运动控制指令与S7-200SMART运动控制指令有很多相似之处,S7-1200运动控制指令功能是非常强大的,S7-1200运动控制中使用了轴的概念,通过对轴的组态,包括硬件接口,位置定义、动态特征、机械特性等等与相关的指令块组合使用,可以实现绝对定位、相对定位、点动、转速控制和自动寻找参考点的功能。今天小智用的S7-1200运动控制指令编写简单的定位控制程序。S7-1200CPU本体集成硬件输出点最高频率为100kHZ,但这些输出点会被PTO功能独立使用,不会受扫描周期的影响,其作为普通输出点的功能将被禁止。硬件输出的组态具体操作的步骤如下:1)选择设备组态;2)选择合适的CPU;3)在属性选项卡中激活使能高速脉冲发生器功能。硬件组态如下图所示:脉冲发生器组态,脉冲输出类型选择如下图:工艺对象“轴”组态“轴”工艺对象是用户程序与驱动的接口。工艺对象从用户程序中收到控制命令,在运行时执行并监视执行状态。“驱动”表示步进电机加电源部分或者伺服驱动器加脉冲接口转换器的机电单元。驱动是由PLC产生脉冲来控制“轴”工艺对象的。运动控制功能指令块必须在轴对象组态完成后才能使用。工艺对象的组态包括以下几个部分:参数组态参数组态主要定义了轴的工程单位,软硬件限位,启动/停止速度,参考点定义等。进行参数组态前,需要添加工艺对象,具体操作为:选择项目树——工艺对象——插入新对象选项,双击该选项弹出插入新对象对话框,单击Motion选项,在名称文本框中输入对象名称,选择轴对象数据块编号,单击“确认”按钮确认。单击完成后可以在项目树中看到添加好的工艺对象,双击Configuration(组态)选项进行参数组态,进入工艺对象组态目录树,如下图所示:(1)硬件接口图中所示组件的具体含义如下所述:选择脉冲发生器:此下拉列表框中可选择使用Pulse1或Pulse2作为脉冲输出。设备组态:此处可进入PLC模块硬件组态页面。用户单位:为系统选择长度单位,包括毫米、米、英寸、英尺、脉冲数、角度。(2)驱动器信号图中所示组件的具体含义如下所述:选择“启用输出”:设置使能滑台伺服的输出点。选择“输入就绪”:设置驱动器状态正常输入点,当驱动设备正常时会给出一个开关量输出,此信号可接入到CPU中,告知运动控制器驱动正常。如果驱动不提供这种接口,可将此参数设为“True”。(3)机械图中所示组件的具体含义如下所述:电机每转脉冲数:电机旋转一周所需的脉冲个数。电机每转的运载距离:电机旋转一周机械产生的位移。(4)位置监视图中所示组件的具体含义如下所述:激活硬限位开关:使能机械系统的硬件限位功能,在轴到达硬件限位开关时,它将使用急停减速斜坡停车。启用软限位开关:使能机械系统的软件限位功能,此功能通过程序或者组态定义系统的极限位置。在轴到达软件限位开关,轴运动将被停止。工艺对象报故障,在故障被确认后,轴可以恢复在工作范围内的运动。输入硬限位开关下限;输入硬限位开关上限选择电平:限位点有效电平,分为HighLevel(高电平有效)和LowLevel(低电平有效)两种软限位开关下限位置;软限位开关上限位置(5)动态参数图中所示组件的具体含义如下所述:速度限值的单位:此处选择速度限制值单位,包括revs/min(转/分钟)和Pulse/s(脉冲数/秒)两种。最大速度:定义系统的最大运行速度,以毫秒/秒为单位的最大速度,由系统自动计算。启动/停止速度:定义系统的启动/停止速度,考虑到电机的扭矩等机械特性,其启动/停止速度不能为0。加速度;减速度;加速时间;减速时间加/减速度与加/减速时间这两组数据,只要定义其中任意一组,系统会自动计算另外一组数据,这里的加/减速度与加/减速时间需要用户根据实际工业要求和系统本身特性调试得出。(6)急停图中所示组件的具体含义如下所述:紧急减速度:此处定义从最大速度到启动/停止速度的减速度急停减速时间:此处定义从最大速度启动/停止速度的减速时间(7)回原点回参考点组态如下图所示,图中所示组件的含义如下所述:输入参考点开关:此处定义参考点,一般使用数字量输入作为参考点开关。允许硬限位开关处自动反转:此处可使能在寻找参考点过程中碰到硬件限位点自动反向,在激活回参考点功能后,轴在碰到参考点之前碰到了硬件限位点,此时系统认为参考点在反方向,会按组态好的斜坡减速曲线停车并反转。若该功能并没有被激活并且轴到达硬件限位点,则回参考点过程会被立即停止。逼近/回原点方向:此处定义在执行寻找参考点的过程中的初始方向,包括正向寻找和负向寻找两种方式。参考点开关一侧:此处定义使用参考点左边沿或者右边沿。逼近速度:在进入参考点区域时的速度。参考速度:在进入参考点区域后,到达参考点位置时的速度。原点位置偏移:在参考点开关位置和参考位置有差别是,在此时输入距离参考点的偏移量。轴以到达速度接近零位,在MC_Home语句的“位置”参数指定绝对参考点坐标。参考点位置:参考点坐标有MC_Home指令块的Position参数确定。S7-1200运动控制指令简单控制程序如下图所示:西门子S7-1200与V80伺服进行运动控制实例一、硬件配置:二、4路高速脉冲输出信号分配表:三、硬件接线四、S7-1200编程:(1):添加轴工艺对象:(2)组态轴工艺对象的扩展对象参数:(3)添加命令表:(4)编程:说明:二、回原点西门子S7-1200PLC如何转换模拟量模拟量模块是SM1234,2输入2输出。可以选择电压模式或电流模式,下例选择-10V-10V电压输入输出设置,电压输出0-10V。配置地址查看模块说明,输入-10V-10V对应的数值是-27648-27648,输出同样-10v-10v对应-27648-27648,下面是模拟量输入程序:将模拟量输入1通道对应的地址IW136转换成浮点数MD304:然后除以2764.8就得到实际电压值比如IW136=27648,转换成浮点数除以2764.8=10,表示实际电压值是10VIW136=13824,转换成浮点数除以2764.8=5,表示实际电压值是5V下面是模拟量输出程序,假设MD360存储是要输出的电压伏数,乘以2764.8转换成整数放入QW134即可。因为满输出对应10V对应是27648,1V就是2764.8,2V就是2X2764.8。
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码




 刀客8888
刀客8888
本文标题:S7-1200运动控制
链接地址:https://www.777doc.com/doc-7126885 .html