您好,欢迎访问三七文档
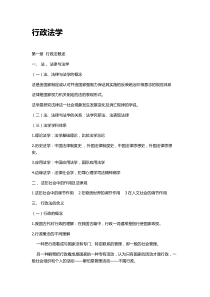
二自由度并联机械手机械动力学分析组员:温晓韬麦万庚刘靖王爽孙永泉党红星小组分工动力学分析:党红星麦万庚ADAMS仿真:刘靖关键问题分析:温晓韬王爽三维建模:麦万庚孙永泉二维图形绘制:刘靖温晓韬PPT制作:王爽党红星演讲:孙永泉一、机构实物图如图所示,并联机器人由两条支链(分别各有一个电机驱动)和动平台组成,各支链包含两个平行四边形机构。简介二、机构运动简图如图为机构运动简图,即平面五连杆机构,P为末端位置点,𝑙0、𝑙1、𝑙2分别为机架的半长、主动臂长度、从动臂长度。三、构件参数左支链连杆参数表右支链连杆参数表四、动力学分析机械手各杆坐标系末端运动轨迹五、ADAMS仿真六、关键性问题分析q1q2L10L1+L2L2绘制表格如下另一种方法求解式中:2、二自由度机械手左右支链末端位置求解DH参数法建立机器人的运动学正解
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码

 hnfgcj
hnfgcj
本文标题:双自由度-温晓涛
链接地址:https://www.777doc.com/doc-7169752 .html