您好,欢迎访问三七文档
当前位置:首页 > 行业资料 > 冶金工业 > 第4章根轨迹分析法习题解答
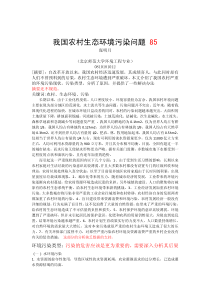
第四章根轨迹分析法4.1学习要点1根轨迹的概念;2根轨迹方程及幅值条件与相角条件的应用;3根轨迹绘制法则与步骤;4应用根轨迹分析参数变化对系统性能的影响。4.2思考与习题祥解题4.1思考与总结下述问题。(1)根轨迹的概念、根轨迹分析的意义与作用。(2)在绘制根轨迹时,如何运用幅值条件与相角条件?(3)归纳常规根轨迹与广义根轨迹的区别与应用条件。(4)总结增加开环零、极点对系统根轨迹的影响,归纳系统需要增加开环零、极点的情况。答:(1)当系统某一参数发生变化时,闭环特征方程式的特征根在S复平面移动形成的轨线称为根轨迹。根轨迹反映系统闭环特征根随参数变化的走向与分布。根轨迹法研究当系统的某一参数发生变化时,如何根据系统已知的开环传递函数的零极点,来确定系统的闭环特征根的移动轨迹。因此,对于高阶系统,不必求解微分方程,通过根轨迹便可以直观地分析系统参数对系统动态性能的影响。应用根轨迹可以直观地分析参数变化对系统动态性能的影响,以及要满足系统动态要求,应如何配置系统的开环零极点,获得期望的根轨迹走向与分布。(2)根轨迹上的点是闭环特征方程式的根。根轨迹方程可由闭环特征方程式得到,且为复数方程。可以分解为幅值条件与相角条件。运用相角条件可以确定S复平面上的点是否在根轨迹上;运用幅值条件可以确定根轨迹上的点对应的参数值。(3)归纳常规根轨迹与广义根轨迹的区别与应用条件。考察开环放大系数或根轨迹增益变化时得到的闭环特征根移动轨迹称为常规根轨迹。除开环放大系数或根轨迹增益变化之外的根轨迹称为广义根轨迹,如系统的参数根轨迹、正反馈系统根轨迹和滞后系统根轨迹等。绘制参数根轨迹须通过闭环特征方程式等效变换,将要考察的参数变换到开环传递函数中开环放大系数或根轨迹增益的位置上,才可应用根轨迹绘制规则绘制参数变化时的根轨迹图。正反馈系统的闭环特征方程0)()(1sHsG与负反馈系统的闭环特征方程1()()0GsHs存在一个符号差别。因此,正反馈系统的幅值条件与负反馈系统的幅值条件一致,而正反馈系统的相角条件与负反馈系统的相角条件反向。负反馈系统的相角条件(k2)是180根轨迹,正反馈系统的相角条件(k20)是0根轨迹。因此,绘制正反馈系统的根轨迹时,凡是与相角有关的绘制法则,如实轴上的根轨迹,根轨迹渐近线与实轴的夹角,根轨迹出射角和入射角等等,都要变k2角度为k20。(4)由于开环零、极点的分布直接影响闭环根轨迹的形状和走向,所以增加开环零、极点将使根轨迹的形状和走向发生改变,从而使系统性能也随之发生变化。一般地,增加合适的开环零点,可使闭环系统的根轨迹产生向左变化的趋势,从而改善系统的稳定性和快速性。增加开环极点时,增加了根轨迹的条数,改变了根轨迹渐近线的方向,可使闭环系统的根轨迹产生向右变化的趋势,削弱系统的稳定性和快速性。增加开环零极点,都将改变根轨迹渐近线与实轴的交点与夹角,可能改变根轨迹在实轴上的分布。如果系统期望主导极点在根轨迹左侧时,可通过增加开环零点(超前校正),使闭环系统的根轨迹向左弯曲,通过期望主导极点,满足系统动态要求;如果系统期望主导极点在根轨迹右侧时,可通过增加开环极点(滞后校正),使闭环系统的根轨迹向右弯曲,通过期望主导极点,满足系统动态要求。题4.2已知负反馈控制系统的开环传递函数,试绘制各系统的根轨迹图。(1))4)(2()()(sssKsHsG(2))4()2()()(2ssKsHsG(3)3)2()()(sKsHsG解:(1))4)(2()()(sssKsHsG1)起点:三个开环极点3,4,2,0321nppp。2)终点:无有限开环零点0m。3)实轴上]02[]4,、,(为根轨迹区间。4)根轨迹渐近线000180,6003)12(18020342kA5)求分离点155.33322845.03322081230)()()()(212''sssssAsBsBsA解得:得:因为实轴上的根轨迹在]02[]4,、,(区间内,所以分离点为1s。6)根轨迹与虚轴的交点系统的闭环特征方程为:08623Ksss造劳斯表:KSKSKSS0123068681为使S1行为零,应有48K由S2行得辅助方程:04862s解得:83.28jjs根轨迹如图4.1所示。42048Kj2.83,48Kj2.83,0.845j图4.1题4.2(1)根轨迹(2))4()2()()(2ssKsHsG1)起点:三个开环极点3,4,2,2321nppp。2)终点:无有限开环零点0m。3)实轴上]4,(为根轨迹区间。4)根轨迹渐近线000180,6003)12(1803803422kA5)求分离点3102020630)()()()(212''sssssAsBsBsA,解得:得:因为实轴上的根轨迹在]4,(区间内,且-2为系统开环重极点,所以分离点为1s。6)根轨迹与虚轴的交点系统的闭环特征方程为:01620823Ksss将j代人s,整理得:0)20()168(32jK由此可得下列联立方程:0)20(016822K解得:144,52K根轨迹如图4.2所示。41445j2K,1445j2K,2380j图4.2题4.2(2)根轨迹(3)3)2()()(sKsHsG1)起点:三个开环重极点3,2321nppp。2)终点:无有限开环零点0m,因此,根轨迹分成3条,它们均由-2出发趋向无限远点。3)实轴上]2,(为根轨迹区间。4)根轨迹渐近线000180,6003)12(180203222kA5)求分离点实轴上的分离点为-2。6)根轨迹与虚轴的交点系统的闭环特征方程为:0812623Ksss将j代人s,整理得:0)12()86(32jK由此可得下列联立方程:0)12(08622K解得:64,32K可见,根轨迹与其渐近线重合。根轨迹如图4.3所示。26432Kj,6432Kj,0j图4.3题4.2(3)根轨迹题4.3已知负反馈控制系统的开环传递函数为(1))4)(2()3()()(sssKsHsG(2))4)(2()3()()(ssssKsHsG(3))22()2()()(2ssssKsHsG试绘制各系统的根轨迹图。解:(1))4)(2()3()()(sssKsHsG1)起点:两个开环极点2,4,221npp。2)终点:有一个有限开环零点1,3mz。3)实轴上]2,3[]4、,(为根轨迹区间。4)根轨迹渐近线0018012)12(180312342kA即:系统根轨迹分成两条,一条从)02(,点出发,终止于有限开环零点)03(,,另一条从)04(,点出发,沿正实轴方向趋于无限远点。根轨迹如图4.4所示。2340j图4.4题4.3(1)根轨迹(2))4)(2()3()()(ssssKsHsG1)起点:三个开环极点3,4,2,0321nppp。2)终点:一个有限开环零点13mz,。3)实轴上]02[]34[,、,为根轨迹区间。4)根轨迹渐近线000913)12(18023133420kA5)求分离点02463152s0)()()()(23''sssAsBsBsA得:因为实轴上的分离点应该在]02[,区间内,利用凑试法可得1.11s。根轨迹如图4.5所示。21.1403j图4.5题4.3(2)根轨迹(3))22()2()()(2ssssKsHsG1)起点:三个开环极点3,1,1,0321njpjpp。2)终点:一个有限开环零点12mz,。3)实轴上]02[,为根轨迹区间。4)根轨迹渐近线000913)12(1800132110kjjA)()(即渐近线为虚轴。5)根轨迹的出射角02000001111000)4590135(180)(180故得:由njmiijl根轨迹如图4.6所示。20j1j1j图4.6题4.3(3)题4.4有一个开环传递函数为)15.0()1()()(2sssKsHsG的负反馈系统,试绘制系统的根轨迹。解:1)起点:三个开环极点3,2,0321nppp。2)终点:一个有限开环零点11mz,。3)实轴上]12[,为根轨迹区间。4)根轨迹渐近线000913)12(18021131-200kA根轨迹如图4.7所示。2015.0j图4.7题4.4根轨迹题4.5已知负反馈控制系统的开环传递函数为)4)(2)(1()()(sssKsHsG,试证明31js是该系统根轨迹上的一点,并求出相应的K值。解:系统有三个开环极点,无开环有限零点。开环零极点与31js点的分布如图4.8所示。j2431j10600900300图4.8题4.5系统开环零极点分布1)若s为根轨迹上的点,则必满足相角条件,即:∵0000321180306090)()()(PsPsPs∴s是根轨迹上的一点。2)求与s相应的K值。根据幅值条件:12132231))()((11321PsPsPsK所以12K4.6设负反馈系统的开环传递函数为)4()6()()(sssKsHsG,试证明该系统根轨迹为一圆形,并指出其圆心和半径。证明:设s为系统根轨迹上的一点,则根据相角条件有:00180)4()()6180)4()6(jjjjssss(可得令即:018046arctgarctgarctg整理得:418060arctgarctgarctg利用反正切公式,可得:41806160arctgarctg等式两端取正切:4616整理得:12)6(22可知,上式为一圆的方程,圆心)06(,,半径为32。题4.7有一开环传递函数为)4)(2()()(sssKsHsG的负反馈控制系统,试用根轨迹法求使闭环系统主导极点的衰减系数等于5.0时的K值,并求出此时闭环系统的特征根。解:系统的根轨迹如图4.9所示。当5.0时,阻尼角为0605.0arccos,此时阻尼线与根轨迹的交点即为系统的闭环主导极点,而相应的K值即为所求。设主导极点为nnnnjsjs222111,代入特征方程得:0)41)(21)(1(222nnnnnnjjjK取1s(2s同理),并将5.0代入上式,得:0)42321)(22321)(2321(nnnnnnjjjK整理并令实部与虚布分别为零,可求出:(舍去),,34.926.794.1KKnn则可得到主导极点为2.17.02.17.021jsjs,代入特征方程可求解出7.43s42048Kj2.83,48Kj2.83,0.845j0609Kj1.27.01,s9Kj1.27.02,s9K7.43,s图4.9题4.7根轨迹及阻尼角图即当5.0时,9K,而此时闭环系统的特征根为
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码





 jjc0072
jjc0072
本文标题:第4章根轨迹分析法习题解答
链接地址:https://www.777doc.com/doc-7313517 .html