您好,欢迎访问三七文档
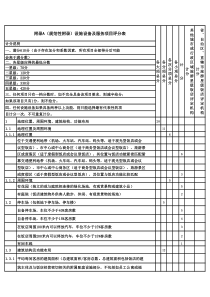
§2.1机构的组成§2.2平面机构的运动简图§2.3平面机构的自由度第2章平面机构的结构分析构件:机器中的独立运动单元。(构件可能是一个零件,也可能是由多个零件共同组成的不产生任何相对运动的刚性联接。)2.1机构的组成3.1.1运动副运动副:两个构件直接接触并能产生一定的相对运动的连接。运动副元素:两构件上直接参加接触构成运动副的部分。2.1.2自由度和运动副约束自由度:把构件相对于参考系具有的独立运动参数的数目称为自由度移动移动转动按两构件接触情况,常分为低副、高副两大类。1.低副两构件以面接触而形成的运动副。(1)转动副:只允许两构件作相对转动,又称作铰链。a)固定铰链约束:当两构件组成运动副后,它们之间的某些相对运动受到限制,对于相对运动所加的限制称为约束。b)活动铰链转动副(2)移动副:只允许两构件作相对移动。移动副2.高副两构件以点或线接触而构成的运动副。凸轮副齿轮副2.1.3运动链和机构运动链:指两个以上的构件以运动副连接而构成的系统开链闭链平面机构运动简图的概念用规定的符号和线条按一定的比例表示构件和运动副的相对位置,并能完全反映机构特征的简图。机构运动简图应包括内容:(1)构件数目;(2)运动副的数目和类型;(3)构件之间的连接关系;(4)与运动变换相关的构件尺寸参数;(5)主动件及运动特性。2.2平面机构的运动简图2.转动副2.2.1运动副及构件的表示方法1.构件构件均用线段或小方块来表示,画有斜线的表示机架3.移动副4.平面高副2.2.2绘制机构运动简图的步骤1)分析机构,观察相对运动,确定机架、原动件和从动件;2)确定所有运动副的类型和数目;3)选择合理的位置(即能充分反映机构的特性);4)确定比例尺5)用规定的符号和线条绘制成简图。;图上尺寸实际尺寸)(mm)m(lμ例2.1试绘制内燃机的机构运动简图气缸体1活塞2进气阀3排气阀4连杆5曲轴6凸轮7顶杆8齿轮10解:1)分析运动,确定构件的类型和数量2)确定运动副的类型和数目3)选择视图平面4)选取比例尺,根据机构运动尺寸,定出各运动副间的相对位置5)画出各运动副和机构符号,并表示出各构件4444332211ABo22.3平面机构的自由度1.实例分析2.3.1机构具有确定运动的条件五杆铰链机构不能产生运动2.结论机构具有确定运动时所必须给定的独立运动参数的数目称机构的自由度。平面机构具有确定运动的条件:机构原动件个数应等于机构的自由度数目。原动件数<自由度数,机构无确定运动原动件数>自由度数,机构在薄弱处损坏2.3.2平面机构自由度的计算1.构件自由度的计算hlPPnF23n:机构中活动构件数;Pl:机构中低副数;Ph:机构中高副数F:机构的自由度数;n=3,Pl=4,Ph=0F=3n-2Pl-Ph=3×3-2Pl-Ph=3×3-2×4-0=1计算实例:2.3.3自由度计算时应注意的几种情况1.复合铰链两个以上的构件在同一处以同轴线的转动副相联。三个构件在同一轴线处,两个转动副。推理:m个构件时,有m–1个转动副。惯性筛机构C处为复合铰链n=5,Pl=7,Ph=0=3×5-2×7–0=1F=3n-2Pl–Ph例:2.局部自由度与输出构件运动无关的自由度称局部自由度。F=3×3-2×3-1=2F=3×2-2×2–1=1凸轮机构3.虚约束在特殊的几何条件下,有些约束所起的限制作用是重复的,这种不起独立限制作用的约束称为虚约束。平面机构的虚约束常出现于下列情况:★两相连接构件在连接点上的运动轨迹相重合★机构运动时,如果两构件上两点的距离始终保持不变,将此两点用构件和运动副连接,则会带入虚约束。★如果两个构件组成多个移动方向一致的移动副,或两个构件组成多个轴线重合的转动副时,只需考虑其中一处的约束,其余各处带进的约束均为虚约束。★机构中对运动不起作用的对称部分引入的约束为虚约束例:试计算如图所示大筛机构的自由度。复合铰链局部自由度虚约束n=7,Pl=9,Ph=1F=3n-2Pl–Ph=3×7-2×9–1=2
 三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
三七文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 扫描二维码
扫描二维码


 星云的天空
星云的天空
本文标题:机构的组成
链接地址:https://www.777doc.com/doc-7821486 .html